





“基于激光测距的主动三维景深的重构技术研究与系统开发”为国家863计划智能机器人技术专题项目。本项课题的主要创新点在于:针对传统方法利用电机模块驱动激光测距仪时由于光源振动造成误差的缺陷,提出利用多边形玻璃柱体的转动来代替激光测距仪的转动从而解决光源振动带来误差的问题。本项课题提出基于激光测距的主动三维景深的重构研究,旨在从视觉信息的获取和处理的角度探讨移动机器人的相关理论及其应用特点,从而为自主移动机器人的定位、导航、轨迹规划等技术的开发作出贡献。
本系统采用ARM+DSP+FPGA的整体构架:
1) 利用DSP对激光测距数据进行采集,采用先进的模糊PID控制算法实现多轴电机控制及通过基于时间标签的同步方法实现运动体间的控制同步。
2) 利用FPGA对测距数据进行处理,实现了原始采集数据的局部滤波处理和视觉测量模型计算的并行执行,数据运算速度比普通的嵌入式微处理器效率大大提高。
3) 基于ARM-Linux的嵌入式三维数据采集与重构平台,采用开源Linux操作系统,使得在复杂的功能下系统的开发变得相对简单。
4) 算法方面,我们提出了局部二邻域均值快速自动滤波算法和基于GA-BP神经网络数据修补算法,其中局部滤波算法能快速的解决分散的少量测量数据丢失的问题,GA-BP算法则主要针对大面积数据丢失的情况,有效的解决了空洞数据修补问题。
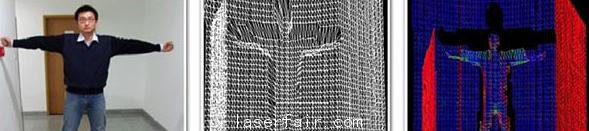
成像效果图如下:
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读


































 关注我们
关注我们

