





引言
我国拥有300多万平方千米的辽阔海域,大陆岸线长达18000多千米,岛屿岸线长达14000多千米。水深在50m以内的海域面积达50万平方千米,这些海域是军民兼用最重要的海区。到目前为止,我国东海、南海海域仍有大面积海域的海岛礁情况不清楚,影响我国对相关海洋权益的保护,造成大量的海洋资源流失。海洋测绘是一切海洋经济开发与国防活动的基础,海洋中的海岛、岛礁及其周边海底地形测量是海洋测绘最基本的任务之一。
激光雷达扫描技术又称为“实景复制技术”,是20世纪90年代初开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术领域的新突破。该技术以激光主动探测为工具,获取被探测物体的三维坐标信息,采集到的数据直接存储为三维坐标,为后期各行业应用提供高精度的数据源。机载双频激光雷达以飞机为搭载平台,使测绘效能有了极大的提高。通过结合GPS技术和惯性导航技术,机载双频激光雷达可以直接测绘出地形、地貌的三维数据,这些数据经简单处理即可生成高精度的地形图、数字地面模型(DTM)和数字高程模型(DEM)。激光雷达数据可以直接与其他要素或影像数据合成,生成内容更为丰富的各类专题地图。
机载双频激光雷达是集激光测距技术、GPS定位技术、飞机姿态测量技术、航空摄影、高速数字信号处理技术等多种高新技术于一体的新型主动机载激光测绘、侦查系统,其主要应用于航道、海滩和海岸线、浅海编图、暗礁深度、海岛、岛礁、水下障碍物的快速调查,是海陆交界区域水陆一体化快速测绘的重要技术手段。
机载激光测深特点
1
机载激光测深发展历程
机载激光扫描技术的发展,源自1970年美国航空航天局(NASA)的研发。全球定位系统(GPS)及惯性导航系统(INS)的发展,使精确、实时定位定姿成为可能。到20世纪80年代末,以机载激光雷达测高技术为代表的空间对地观测技术在多等级三维空间信息的实时获取方面产生了重大突破,激光雷达探测得到了迅速发展。到20世纪90年代中后期,世界各发达国家的机载双频激光雷达产品在参数指标上已经逐渐趋于完善,并已将该技术广泛应用于建设工程和测绘工程(国土/海域勘测、地表地貌三维测量)等多个领域。到90年代末,三维激光雷达产品已经形成了颇具规模的产业。
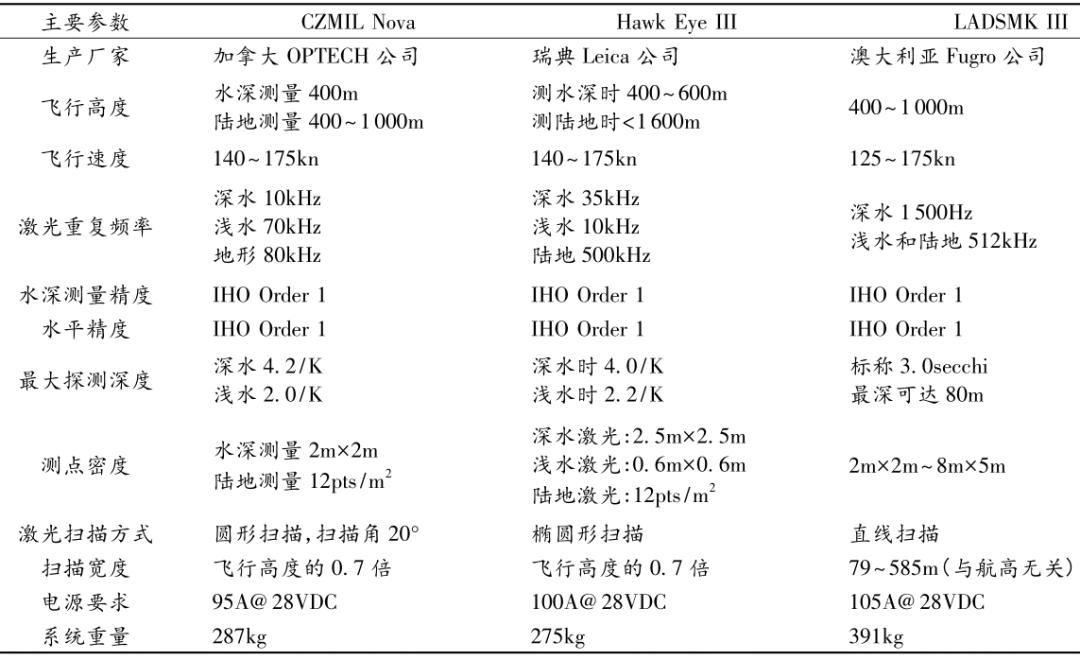
目前,世界上较著名的测深能力达到50m的深水型机载激光测深系统有加拿大Optech公司的CZMIL系列、瑞士Leica公司的HawkEye系列和澳大利亚Fugro公司的LADS系列产品,其中,Optech公司的CZMIL系列及早期型号SHOALS系列市场占有率最高,仅美国、加拿大、日本等3个国家海洋调查部门采购超过15套,该公司同时承接海岸带工程测量项目,最新型号是CZMILNova2;Leica公司的HawkEye系列产品主要市场在欧洲,其他地区未见销售记录,最新型号是HawkEyeIII;澳大利亚Fugro公司的LADS系列产品未见销售记录,该公司以承接海岸带工程测量项目为主,截止到2015年,完成的水深测量项目超过50项,作业区域遍布全球,最新型号是LADSHD。技术指标方面,三型设备基本差不多,但LADS系统深水测量频率明显偏低,详细指标见表1。
表1 CZMIL、HawkEyeⅢ及LADSMKⅢ主要技术指标对比
2
机载激光测深系统的特点
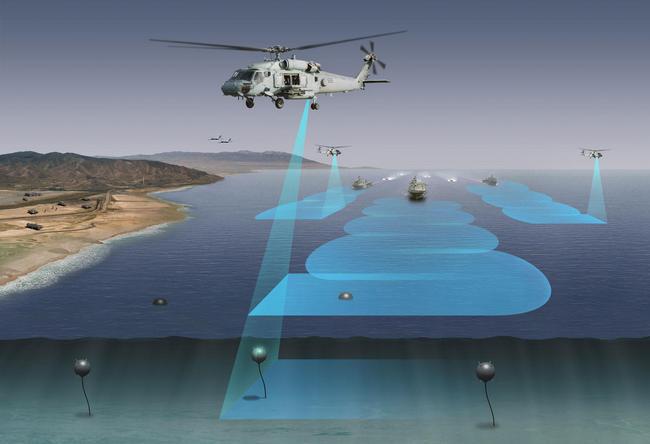
机载激光测深系统的基本工作原理是激光器向海面同时发射532nm波长的蓝绿光束和1064nm波长的红外光束,蓝绿光穿透水体,到达海底反射,红外光不能穿透海水,被海面反射,通过记录两束激光发射接收的时间差,分别计算激光发射中心到海面高度和到海底高度,然后进一步计算出水深。因激光对海水的穿透能力限制及飞机平台的特点,机载激光测深与传统的船载多波束测深比较,具有如下特点:
⑴作业效率高。一是飞机作业速度快,一般为140~175kn,而测量船作业速度仅有8~10kn;二是航带覆盖宽度大,机载激光雷达的航带宽度为航高的0.7倍,按照400m航高的典型值计算航带宽度为280m,船载多波束条带覆盖宽度为水深的3~5倍,浅水水域一般约100m;三是可实现陆海一体化测绘,实现水深和陆地地形的无缝拼接;四是测绘产品丰富,新型激光测深系统,既可获取陆海二维三维基础地形信息,也可通过加装高光谱相机和航空摄影相机,同步获取高光谱影像和航空影像信息,进而制作海陆分界图、海水叶绿素浓度图、海水含沙量分布图、海底底质分类图等各种专题测绘产品;五是作业综合效费比高,机载激光测深的单位时间作业费用是船载多波束测深的3倍,但综合考虑机载激光测深与船载多波束测深的测量速度、条带覆盖宽度、产品多样性等因素,机载激光测深综合效费比约为船载多波束测深的8倍。
⑵响应速度快。可根据任务需要,在极短时间内完成目标区的全覆盖水陆一体化地形精密测量,尤其适用于海洋工程、环境(灾害)评估、应急保障等需要快速反应的场合。
⑶作业区域广。机载激光测深作为以飞机为平台的非接触式测量系统,既可以执行海岸带基础测绘任务,也可以执行港口、航道、近海海洋工程等测绘任务,又可在测量船难以到达的礁石密布海域、人员无法登岛的岛礁及周边海域及滩涂、潮间带等其他作业困难海域执行测绘任务。
⑷限制条件多。激光束在海水中以指数衰减,最大穿透能力与激光发射能量、海水透明度、海底反射率和背景光噪声密切相关,目前典型商用设备测深能力在一类水质、底反射率>15%条件下可达到50m,此外,激光测深不能保证能够有效探测1m3的水下小目标。因此,机载激光测深适用于水陆交界地区海水透明度较高的浅水水域。
综上所述,机载激光测深作为水陆交界地区的主动式、非接触、水陆一体化测绘技术,可与传统船载多波束测深、侧扫声纳测量等技术手段相互配合,更高效地完成海岸带测绘任务。
机载激光测深作业关键技术问题
作者结合机载激光测深系统飞行作业试验,对试验过程中出现的问题进行了总结梳理,试验采用的激光测深系统性能及有关基本参数信息如下:
设备型号:CZMILNova(主要技术参数见表1);作业平台:直升机;飞行高度:400m;飞行速度:180km/h;测线间距:200m(相邻航带重叠30%);地面控制:相距1km的双GNSS基准站;水位观测:作业海区投放自动验潮仪;轨迹解算:Applanix POSPac8.1版本软件包;数据处理:CZMIL HydroFusion1.1版本软件包。
1
机载设备天线安装位置选择
机载设备天线的安装位置对数据精度的影响较大。试验采用直升机平台,飞机有主螺旋桨和尾翼稳定螺旋桨,其中主螺旋桨旋转时覆盖整个机身,尾翼部分不方便安装天线,加之试验用的GNSS天线属于临时性加装,不允许对飞机机身进行改动,因此,经过讨论分析,GNSS天线安装在飞机自带的两个导航天线中间(见图1),距主螺旋桨轴约2m。
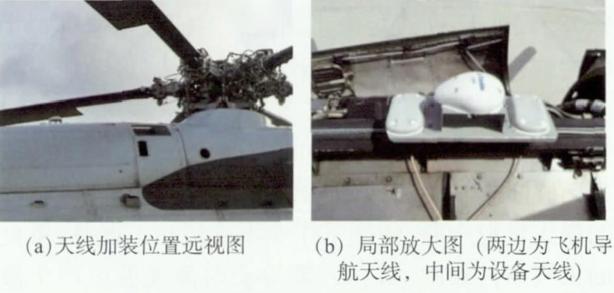
图1 设备天线加装位置实物图
实际作业过程中,通过对第一架次的飞行数据现场初步处理发现,数据位置误差约±1.8m、高程误差约±2.0m,数据质量较差,误差严重超限,无法对测深条带数据进行拼接。经对数据进行进一步处理分析后发现,设备天线信号失锁严重,飞行轨迹数据融合解算误差过大(信号失锁情况见图2)。而主螺旋桨转动时对GNSS信号的遮挡是导致卫星信号失锁的主要原因。
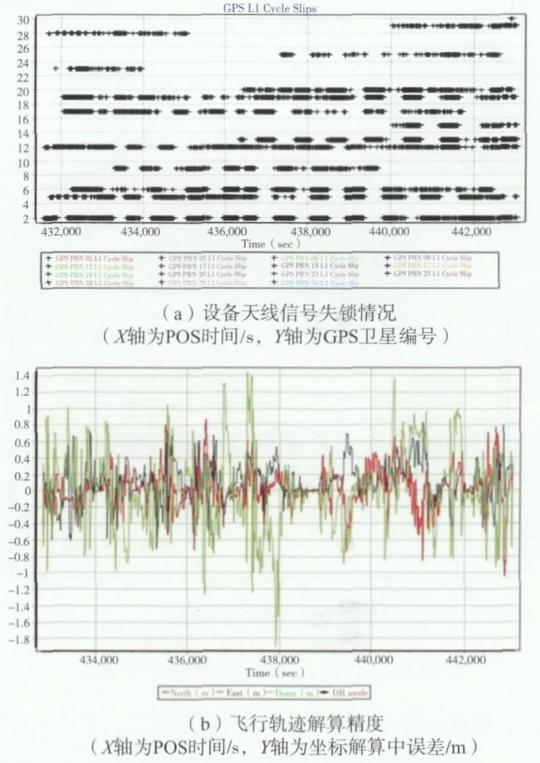
图2 机载设备GNSS天线信号失锁情况统计示意图
飞机返场重新调整天线位置,分别在驾驶舱和主螺旋桨与尾翼螺旋桨的结合部等飞机不同部位进行了信号质量测试,测试结果表明,GNSS天线安装在主螺旋桨与尾翼螺旋桨的结合部时,信号质量最佳。天线安装位置见图3,天线位置调整后信号失锁情况见图4。
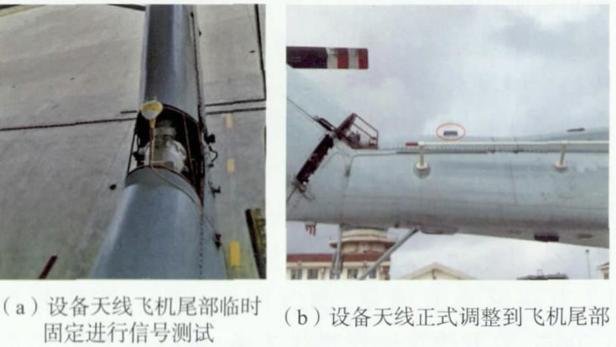
图3 机载设备天线位置调整实物图
从图4可以看出,主螺旋桨转动时,GNSS信号接收仍然有失锁情况,但对定位精度影响已经不大,地面开车测试时,GNSS基准站距飞机2km,POS数据解算结果为位置误差±3cm、高程误差±5cm;飞行作业时,GNSS基准站距作业区30km范围内,POS数据解算结果为位置误差±6cm、高程误差±10cm,测量成果能够满足《海道测量规范》要求。
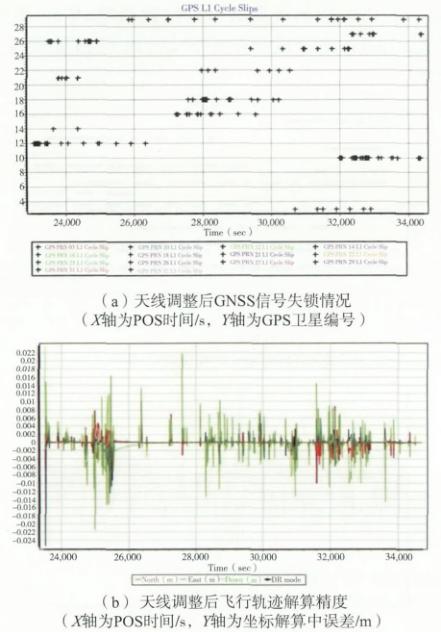
图4 机载设备天线位置调整后信号失锁情况统计示意图
2
标校场选择与测线布设
CZMILNova型激光测深系统的激光发射器同时发射532nm绿光和1064nm红外光,但是激光回波信号进入接收设备后,通过分光棱镜分为9个接收通道,分别为7个浅水通道(接收绿光,能量小)、1个深水通道(接收绿光,能量大)和1个陆地通道(接收红外光),9个接收通道与IMU中心分别有不同的、微小的、固定的系统偏差,以航向(heading)、纵横摇(pitch/roll)角度偏差表示,设备标校的主要目的就是测出这9个接收通道的各自的3个角度偏差,在不同通道的点云数据融合解算时分别进行改正计算。
为了校正9个通道各自的安装角偏差,需要分别布设陆地标校场和海上标校场各1个。陆地标校场标校陆地通道和浅水通道的安装角偏差,海上标校场标校浅水通道和深水通道的安装角偏差。标校场选择及测线布设情况见图5。
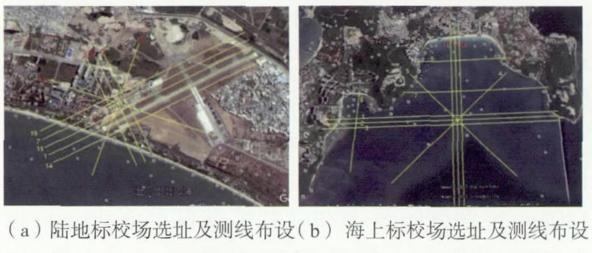
图5 标校场选址及测线布设示意图
陆地标校场选择机场跑道和附近的尖顶建筑物,设计11条测线,相邻测线重叠50%,其中:机场跑道设计东西向测线3条,分别为L1、L2、L3,其中L2为往返重复测量,测线间距130m,测线长度1700m;尖顶建筑标校测线7条,东西向2条,分别为L5、L6,测线间距130m,测线长度1000m;南北向3条,分别为L7、L8、L9,测线间距130m,测线长度600m;设计对角线测线2条,分别为L10、L11,测线长度750m。
海上标校场选择水质清澈的海岸带地区,设计测线11条,相邻测线重叠50%,其中:设计南北向测线3条,分别为L1、L2、L3,均为往返重复测量,测线间距130m,测线长度11km,从陆地一直延伸到60m水深处(要求水深超过设备最大测深能力);设计东西向测线3条,分别为L7、L8、L9,测线间距130m,测线长度4.1km;设计对角线测线2条,分别为L10、L11,测线长度4km。
3
气象条件影响
风、雨、雪、云、雾、光照、气温等气象条件均对激光测深系统的作业性能产生较大影响。大风主要影响飞机的飞行姿态,使飞机难以保持航向,飞机必须以较大倾角飞行,影响GNSS天线的信号接收质量,另外,风引起的拍岸浪较大时,也为岸边浅水深测定和陆海边界的精确提取造成困难。
雨、雪、云、雾对激光测深系统产生同一类影响,CZMIL系列设备的激光器发射的激光束是符合IEEE标准的IV级激光,激光能量较大,在一定距离内能够对人眼产生损害,因此,系统默认飞机航高不能低于290m,回波接收系统持续对回波信号进行实时检测,当计算出航高低于290m时,则自动切断激光发射。下雨或云雾天气条件下实施测量作业时,当激光束打在漂浮在空中的雨滴、雪花、云雾颗粒产生回波时,因实时计算航高低于290m,会造成频繁的激光发射中断,使测量作业不能进行。此外,不良的天气条件如雨、雪、云、雾等会对激光波束产生散射和吸收,引起激光能量的衰减,从而影响激光的探测能力。
环境温度影响激光发射接收系统的工作温度,实施测量作业时,设备温控系统要对激光器机柜进行严格的温度控制,使激光发射装置的温度保持在50℃以内,如果环境温度过高,空调系统的降温效果不佳,则会导致频繁的作业中断。
光照影响设备的测深能力,当背景光噪声大于激光回波信号能量时,则信号接收系统不能提取出有效的回波信号,进而影响设备的探测能力。假设海底底质反射率>15%,则单束脉冲激光束的测深能力可简单表示为:
Dmax=KD/K ⑴
式中,Dmax为系统最大测深,m;KD为最大测深系数,m;K为海水漫射衰减系数,m-1。
KD值在背景光强烈时(正午)约为3.5m、在背景光微弱时(午夜)约为5.0m,一般取值4.2m,这就是CZMIL测深能力经验公式Dmax=4.2K的由来。根据水质情况,K取值范围在0.07~0.5间变动,对应最大测深60m、最浅测深8.4m。
4
其他需要注意的问题
测线设计长度不应过长。原因有二,一是IMU的零漂会对点云数据的解算精度产生较大影响,以CZMILNova型设备为例,配套的IMU&POS为ApplanixPOSAV510,其测姿精度为纵横摇角0.005°、航向角0.008°,零漂为0.1°/hr。如果要使零漂维持在0.01°之内,则测线的最大长度不应大于航速的1/10,即当直升机速度为180km/h时,测线最大长度不应超过18km。二是大功率激光器持续发射会使激光发射装置的温度超过工作温度,从而导致作业中断,一般激光器持续发射5min,则必须停止作业几分钟等待系统降温,所以,测线设计长度不能超过飞行器5min的飞行距离,即当直升机速度为180km/h时,测线最大长度15km,如果采用固定翼飞机,速度一般为300km/h,则测线最大长度25km。
地面GNSS基准站距测区的直线距离不应超过50km。本次试验结果表明,在基准站数据和移动端数据均质量较好的情况下,基准站距测区30km范围内时,飞行轨迹数据解算的平面位置精度为±5cm、高程精度为±10cm;基准站距测区50km范围内时,飞行轨迹数据解算的平面位置精度为±10cm、高程精度为±20cm;基准站距测区约100km时,飞行轨迹数据解算的平面位置精度为±35cm、高程精度为±50cm。试验过程中,精密单点定位(PPK)解算结果为平面位置精度±20cm、高程精度±30cm。
远离大陆岛礁的深度基准传递。当作业区为远离大陆的孤立岛礁时,因1985国家高程基准传递困难,可采用当地平均海面作为深度基准面,具体做法为:在测区周边布设3~4个验潮站,同步验潮15天,得到当地平均海面,同时在岛礁上架设GNSS观测站,进行3×24小时观测,得到观测站大地高,采用水准联测方法将观测站大地高传递到验潮站上,计算得到作业海域当地平均海面与大地高的差值,进而将水深测量成果归算到当地平均海面上。如果作业海域范围较大,平均海面与椭球面大地高的差值不能用某一固定点数值代表,则可采用最新发布的平均海面模型进行内插,得到作业区内不同位置的平均海面与大地高差值。
结束语
随着国外机载激光测深系统的引进,及国产化设备的逐渐定型生产,机载激光测深技术将以其作业效率高、响应速度快、适用范围广的特点逐步成为海陆交界区域重要的测绘技术手段。及时对试验经验及出现的问题进行梳理总结,归纳作业过程中的流程、方法、注意事项,并应用于生产实际将具有重要意义。
在本次试验生产的基础上,下一步重点开展国产机载激光测深系统实用性评估,着手编制《机载激光测深作业规范》。利用本次试验获得的数据,与国内相关科研单位合作,利用国产机载激光测深设备和多波束测深系统对试验区复测,根据复测结果全面检验评估国产设备的各项性能指标,及其与国外设备的技术差距,助力国产化设备的优化完善。同时,针对飞行作业过程中易出现问题的环节,明确设备天线安装、标校场选择、气象条件选择、测线设计、基准站布设、孤立岛礁深度基准传递等方面的技术要求、实施方法和检验程序,同时结合数据后处理工作,规范数据处理和产品制作流程、产品检验程序和方法。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读


































 关注我们
关注我们

