




随着自动驾驶的热潮,“激光雷达”备受瞩目。现在雷达产品也五花八门,国内国外的产品都做得越来越小,外观也越来越漂亮。但是目前这些雷达90%以上都是采用同一种技术方案,即激光飞行时间(TOF)技术。
去年7月份成立的一家初创公司,剑走偏锋,专攻基于相干技术的激光雷达。成立短短4个月后,去年11月获得了百度和华登1800万融资,估值过亿。
在最近“青城山中国IC生态高峰论坛”上,爱莱达科技有限公司总经理潘卫清和大家分享了他们独特的相干波激光雷达方案。

在解释为什么走上相干波路线之前,他先向大家描述了TOF技术的缺陷。
TOF技术的缺陷
TOF技术优点非常的明显,首先是原理简单,通过光脉冲在目标与雷达间的飞行时间乘以光速就可以获得距离,技术路线也很简单是直接测量飞行时间,成熟度比较高,从脉冲激光发送、接收到处理均有成熟的模块组件和专用处理芯片。开发周期也很短,现在公司要做一个TOF雷达也很快。
但TOF雷达其实也存在一些问题,特别是针对未来无人驾驶,潘卫清谈到了4个主要问题:
第一,抗干扰。现在无人驾驶做测试的激光雷达基本上都是单辆车或者少数几辆车在跑,如果以后商用普及,那么路上大量的车都用同样的雷达扫描,雷达就没法识别是附近的车打来的脉冲还是自己发出的信号回波。以后自动驾驶车辆都采用这种设备,在路边很容易用相同雷达同波段的强光源去执行恶意破坏,从而导致雷达失灵。还有就是阳光强烈时,雷达会和人眼一样看不到目标了,从而带来安全隐患。
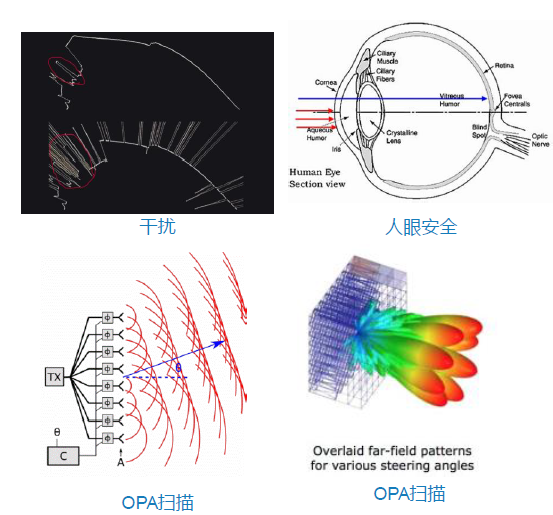
第二,探测距离——会影响车速。人类如果晚上开近光灯开车,车速就上不去,开了远光灯才能保证一定的速度;同理,激光雷达相当于车的眼睛,探测距离近的时候车速上不去。现在激光雷达做到150米到200米就很困难,一般的车用200米都采用了比较高的放射率。
第三,扫描问题。大家都想把激光雷达做成固态的,期待光学相控阵技术(OPA)方案。但OPA不仅对雷达有要求、对主机也有要求,大规模做成以后扫描的出光孔径很小,也就意味着在雷达里会带入损耗,会进一步缩短TOF的探测距离。
第四,全天候工作不太可能。例如雨、雾、雷等恶劣天气影响。
相干激光雷达,有没有必要?
都看到了这里,各位EDN电子技术设计的读者,您觉得创新有没有必要?
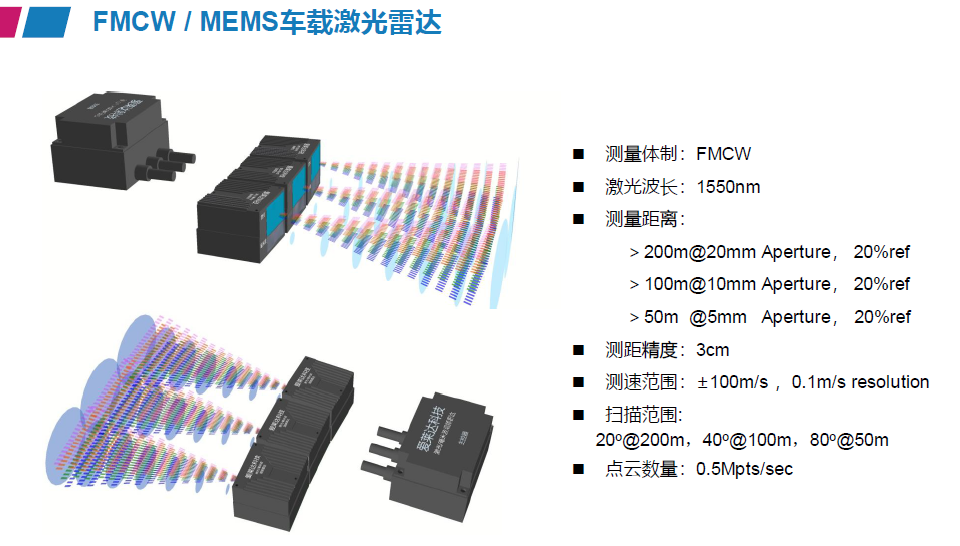
“我们也是基于以上的原因,才寻求新的方案。”潘卫清指出,“我们的方案是相干探测,相干测距,即调频连续波FMCW雷达。很简单就是光源、耦合器、上位机,然后采集。”
该方案发的信号是连续波,频率是线性的周期,调频的一个频率,也就意味着发射的频率和接收的频率有一个差异,这个差异可以通过光学的混频探测探测到它两个波的差,通过频率做一个转换就可以换算出距离,原理其实也不复杂,它增加的模块主要是光学处理部分。
这其中的关键技术包括;激光调频技术,收发光学技术,相干接收技术,然后信号解析算法。

图:总结一下TOF雷达和相干雷达的对比。
上图为TOF雷达和相干雷达的对比。
首先在抗干扰能力上相干方案较强,不需任何处理,光学上就已经解决了。有效探索灵敏度非常高,直接有效探测只需要10个光子就能够精确测试。
也有人认为FMCW激光雷达也有一些局限性,比如与ToF相比需要更多的算力,因此生成全三维环绕图时速度慢。“根本不存在这个问题,这个只是行外人的一种简单推测,”EDN电子技术设计记者为此特地请教潘卫清先生时他指出,“我们有具体的实测数据。”
下图是爱莱达今年开发出的相干激光雷达,目前体积较大的原因主要还是散热,设计距离3公里。发射功率在50到200毫瓦时探测距离就可超过1公里,且能完全直视太阳光工作,不受任何光的干扰。
“未来,我们的雷达还可以跟毫米波做芯片级的融合,雷达工作机制和毫米波的工作机制非常的相似,很多模块可以共用,包括信号的调制模块和处理的模块可以共用。”潘卫清指出。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读




















 关注我们
关注我们

