





单侧,非接触式的激光焊接同高速扫描镜片结合,减少了焊接时间的同时提高了生产率。
远程激光焊接已经正在成为一种替代传统汽车白车身应用中电阻点焊的一种手段。根据行业调查,已安装的设备超过60套,主要集中在欧洲和北美地区。远程激光焊接技术发挥了单侧,非接触式激光焊接带来的技术和经济优势,并将其与高速扫描镜片带来的优势相结合,大大缩短了焊接时间,在整个焊接流程中增加了总生产效率。
远程激光焊接的优势是最为显著的,如果和传统激光/机器人焊接的一些工作周期相比:20mm的缝焊能在0.2-0.4秒内完成,重复定位时间最大3秒,而对于远程焊接来说焊接时间相同,重复定位时间仅为0.2秒。远程焊接的关键优势在于降低了定位时间,这是由于装备了高速的光束扫描装置(见图1)。
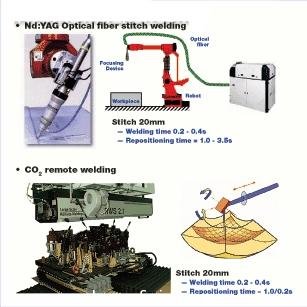
图1. 远程焊接的关键优势是通过高速光束
扫描降低了定位时间
Comau Pico公司很早就曾为推动远程激光焊接技术的发展作出努力,他们曾通过和一些具有前瞻想法的汽车制造商合作,在白车身生产上开辟了新领域。在公司早期获得的成就当中有一项是同Rofin Sinar公司合作,采用一台基于 CO2 激光的远程焊接设备,利用扫描镜片以高速反射光束,焊接车身件的多个焊接位置。
在Fiat Marea车的一个典型部件上,远程CO2 激光焊接被用来替代电阻点焊,它主要用来消除在车后部尾门上采用胶粘剂带来的成本。在这一应用中,总的激光缝焊时间是5秒。在对该车型门框的焊接上,43条激光焊缝仅需30秒就能完成,替代了传统的电阻点焊。在这两种应用中,重复定位时间的降低高达94%。
Comau公司在同Rofin合作获得以上这些应用的经验之后,开始认识到该系统能提供以下的优势:高生产率(高达120个焊点/分),高柔性,减少的占地面积(大多数汽车厂的主要成本因素之一),以及焊接各种不同外形零件的能力。
但是,如果不考虑使用的远程焊接系统,从零件来看,它们必须被紧紧装夹在每个焊接工位。这使得设计和制作夹具成为必需,在一些应用中甚至非常复杂。另一方面,其优点在于,更经济,占用更少空间,相比要使用6到8个夹具的点焊来说,远程焊接的夹具仅需一个。
Comau 也认识到传统的远程焊接系统上的扫描盒存在一些限制,因为它不可能移动远程焊接头。因此Comau开发并申请了一项专利,这是一种快速光束传递系统,在安装到传统的龙门型系统上后,能提供四轴的运动(见图2)。采用该方式的新单元可带来更高产量,高速在零件上移动光束的能力替代了移动部件,并且降低了相关工具的复杂性和成本。这一概念允许用户在龙门框架范围内的任何地点完成焊接。
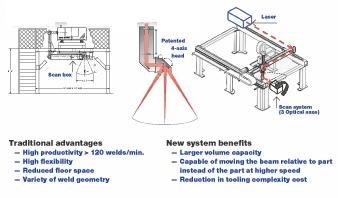
图2.传统的扫描盒被专利的快速光束传递系统替代
和Agilaser公司配合,超过12台甚至更多的远程激光焊接设备现在正在Fiat位于意大利各个工厂运转, 在Mirafiori它们为Idea和Musa两款车型焊接部件;在Melfi它们一直焊接Punto的部件,在Cassino它们焊接新Stilo的部件。系统同样被安装在Renault公司位于斯洛文尼亚Novo Mesto的工厂,用于焊接Clio和Twingo的部件,以及法国Saundoville工厂,焊接Megane的部件;在意大利Pomigilano焊接Stola、Ducato和Alfa159的部件。
在Mirafiori 工厂,一套Agilaser激光设备替代了一条机器人电阻点焊线,它采用双夹具远程焊接系统用于车门装配线,生产投资降低了15%,而生产率提升了20%,同时降低了占地面积——和传统的四机器人焊接系统相比减少了50%。结果是采用激光远程焊接后单件成本降低了30%。
Renault 采用一套Agilaser焊接C85的前门部件(见图3),替代了原先使用的需要12台机器人电阻焊的系统,原系统需要占地1050m2 ,而采用5机器人加工站的 Agilaser仅占地808 m2 。两台 Agilasers以66秒的周期生产部件,焊接93条右侧及左侧激光焊缝,而以前需要电阻点焊130个右侧和左侧焊点。在 Renault公司,一台Agilaser在C65型号的前门焊接38条激光焊缝,仅使用两套相同的夹具。

图3. Renault使用一台 Agilaser焊接C85的前门部件
尽管这些CO2 激光系统从所记录的正常工作时间来看,稳定性超过98%,但它们仍然没有被认为是主流的加工手段,这是由于它们先天在CNC机床结构上的问题导致。因为几乎所有的汽车部件和车身焊接是通过关节型的机器手完成的,而如果使用激光,可选的光束传递方式就是通过光纤。
作为将远程焊接带入下一个阶段所作的努力和欧洲“远程焊接”项目的一部分,Comau公司开发了3D扫描头,并在两年前第一次在慕尼黑激光展上亮相。这一系统配备了Rofin Sinar 4.0千瓦半导体二极管泵浦Nd:YAG激光器,光束传递通过一根捆绑在传统机器手上的400微米直径的光纤。Comau Pico 很快认识到这种模式带来的限制,特别是在使用更高光束质量(更高亮度)激光器如圆盘激光器和光纤激光器时。
在大部分远程激光扫描头上,F-theta 镜用来将光束的焦点保持在和镜片固定距离的位置上,而不论光束的方向性。这一昂贵的设施有很大的直径,其工作范围稍大于其直径,由于F-theta 使得光束相对镜片保持垂直,其代价是牺牲光束质量和光斑大小的变化。而这同样意味着扫描头必须持续重定位并/或放置,采用动态的六轴标准关节式机器人系统。 Comau Pico的SmartLaser(见图4)实质上把镜片集成进空心的机械手中。这一光学准直/放大模块 (类似望远镜)取代了用于传统激光扫描设备上的F-theta 模块(见图5)。

图4. SmartLaser是高速3D系统
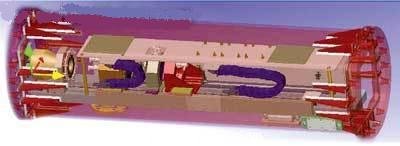
图5.该光学准直/放大模块取代了 F-theta
模块在传统激光扫描设备上的位置
在SmartLaser背后的想法是创造一种高速3D系统,其加速度比机器人要高60到70倍,在焊接区域内拥有8g的动态加速度。该系统拥有的可编程焦距大于750mm,实际上在750mm到1200mm之间,能极大扩展系统的工作距离。这还意味着所有的光学轴,镜筒的X,Y和Z轴和扫描头都能完全集成在焊接系统中,拥有全面的离线编程能力。该创新的扫描头(见图6)装配在机器手前臂的端部,包括两块镜片,第一块在30度角范围运动,另一块在240度角范围运动。该集成允许快速的重复定位,在景深上能得到2到3倍的增加而光斑的大小变形几乎可忽略不计。

图6. 前臂端部的扫描头包括两块镜片,第一块在30度角范围运动,
另一块在240度角范围运动
不像其他扫描头远程焊接系统,该系统所有的轴,运动部件和镜片,均由一个标准的轴控器通过视校面板操纵。这使得编程非常简单便能控制所有的焊接参数,光束方向以及重新定位时的激光变化。
机器人拥有最大化的工具中心点速度 1.5 m/s ,加速度1.2 m/s2 。镜片轴有最大速度4 m/s ,加速度80 m/s2。SmartLaser系统 100mm距离的Z向定位时间仅为70 ms ,而采用二维扫描头的传统机器人需要 580 ms。这意味着我们能在一个焊接周期内完成高达200到300条焊缝的焊接。
光纤和光耦连接在机械手上而不是扫描头上,从而降低了机械应力和疲劳强度,减少了光纤损坏的可能。这和其他的特征一起降低了维护的要求。
Comau目前正在欧洲测试第一台SmartLaser 系统,并且将有一台在美国进行用户测试。公司希望看到在下一年初获得来自汽车行业的第一笔订单。可以想到的是分时多工位/机器人安装能被用于依次加工多个部件,因而激光器一直都在焊接状态,一个工位焊接的同时新的部件也在其他工位完成上料。
结论
远程激光焊接的概念仍然在发展当中,系统不断被改良以满足用户生产中的需求。
供应商正努力降低高昂的初始设备投资和夹具复杂性所带来的影响。激光技术的发展,比如更短波长和光纤及镜片导光方式正在研究当中,此外还有不使用保护气体的手段。
使用传统激光器进行多工位加工以最大化激光使用时间,用于更高产量的生产已经成为了现实。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读


































 关注我们
关注我们

