





随着自动化程度的提高,枕式包装机的功能和操作性得到提高和改进,目前国内许多低端枕式包装机功能简单,只能简单代替集体手工操作,且产品功能单一性,存在低水平重复开发、低价格拼杀的格局。在借鉴了国外高级枕式包装机的先进理念后,国内的轻工机械厂家根据市场的需求,采用OMRON的高级运动控制器 CJ1W MCH71推出了高性能的国产包装机。
系统工艺简介
工艺原理图
轴1(送料):送料轴通过速度控制进行送料,检测到传感器1后判断是否有包装请求,有的话继续进给,没有则停止等待;
轴2(送模):送模轴为系统主轴,以速度控制方式送出包装膜,每次送模时通过色标传感器2作为检测每个膜长的触发信号,通过编码器采集实际膜长,从而能对机械滑差进行补偿;
轴3:张力控制轴跟随主轴运行,并可以实时调节同步速度比,从而控制包装膜张力;
轴4:飞剪端封轴跟随主轴运行,以凸轮同步方式进行同步控制,并且可以根据包装袋长度实时调节凸轮速度比。
具体工艺流程图如图1所示:
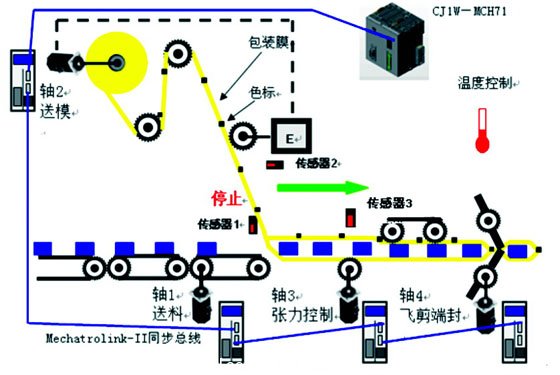
图1 具体工艺流程图
设计要求
包装袋宽度:10-300mm;
包装袋长度:40-410mm;
包装袋高度:1-900mm;
包装速度:200pcs/min。
控制难点
如果因为机器滑差或者张力调节适调导致的包装膜错位,从而导致在端封轴没有在色标处端封,必须能够有自检能力进行色标追踪;
如果包装物在包装袋有滑动,必须检测出,从而防止误切,直到物料在包装袋端封位置中;
如果包装袋中没有包装物,必须检测出,从而防止空切,直到物料在包装袋端封位置中。
欧姆龙解决方案
采用OMRON公司30轴高功能运动控制CJ1W-MCH71,通过Mechatrolink-II(以下简称ML2)高速(10Mbps)同步控制总线控制4轴。
送模轴通过速度控制进给包装膜,在每送一张膜时,通过sensor2作为前一次膜长检测触发信号,直接接入到伺服驱动器高速信号接口,然后通过外部编码器读取实际膜长,与存储的标准长度进行比较,如果有偏差的话,就在下一包进行调整;
飞剪端封轴完成一次端封准备切断时,立刻通过外部传感器3检测色标处是否有异物,如果有异物,端封轴停止进入等待状态,送膜轴自动送出一个膜长,直到下一个色标处进行检测,如果没有异物,则端封轴恢复端封;
飞剪端封完成一次端封前准备切断时,立刻通过传感器2、3,检测当前包装膜中是否为空包,如果为空包,端封轴停止等待进入等待状态,送膜轴自动送出一个膜长,直到下一个色标处进行检测,如果没有空包,则端封轴恢复端封。
配置与部分程序说明
配置说明
控制器:CJ1G-CPU45H+CJ1W-MCH71+TC003;
驱动器:3×88D-WN04H-ML2+1×88D-WT04H(FNY-NS115);
电机:4×R88M-W0430H-S1;
通讯电缆:4×NY-W6003-A5;
终端电阻:FNY-W6022;
触摸屏:NS5-SQ00-V2。
部分程序说明
轴2送模:轴2在送模时,每次必须检测色标传感器2进行膜长比较,如果有偏差的话就要进行位移量的叠加(正、负叠加),那么可以将这个复杂的运动拆分成2个运动的组合,那么可以使用虚轴功能;
虚轴是运动控制器内部可以创建的一个假想轴,专门用于位移量叠加计算进行使用,由于是理想轴,所以不会出现任何偏差,并且可以自己定义任何轨迹图,因此,如果没有偏差的话,轴2就以匀速运动进行运动,那么系统运行非常平稳,而且主轴的位移量偏差的叠加可以作为一个独立的程序段,即使膜长和色标宽度改变,也只需要对虚轴部分程序段进行修改,增强程序扩展性;
具体时序图如图2所示:
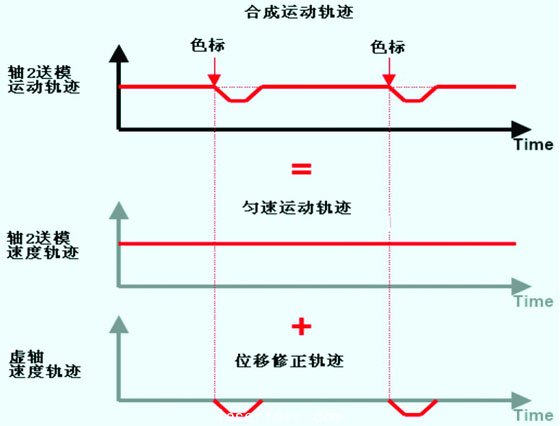
图2 具体时序图
轴2送模部分程序如下:
ADDAX [J02][J32]
//将虚轴J32的位移量叠加到J02
SPEED [J02] T0
//J02进行速度控制
LATCH [J02] #ML0000
//等待sensor2触发信号捕捉J02当前实际膜长并存放
//全局变量#ML0000
WAIT #SW322A=2
//等待触发信号
WAIT #SW322A=4
//等待触发信号完成
#ML0002=#ML0004-#ML0000
//将实际膜长与标准膜长比较,结果存放到
//全局变量#ML0002
INC MOVE #ML0002 //虚轴位移修正
轴4飞剪端封:轴4滚刀周长固定,如果膜长改变的话,那么滚刀的速度就要改变,以凸轮同步方式跟随轴2进行同步运动,如图3所示:
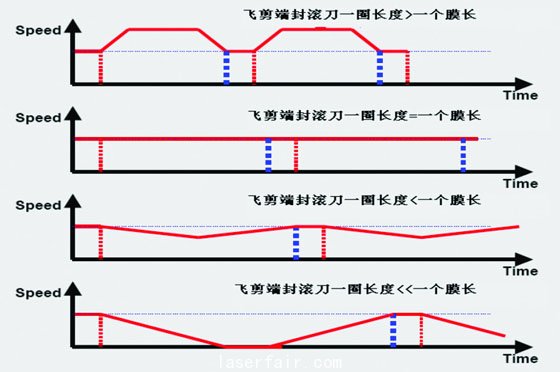
图3 轴4跟随轴2同步运动图
轴4在完成端封前准备切断时,通过检测传感器2、3检测一下包是否为空包,如果为空包,可以根据用户自定义停机或者跳过空包;轴4在完成端封前准备切断时,立刻通过外部传感器3检测色标处是否有异物,如果有异物,端封轴停止进入等待状态,送膜轴自动送出一个膜长,直到下一个色标处进行检测,如果没有异物,则端封轴恢复端封,如图4所示:
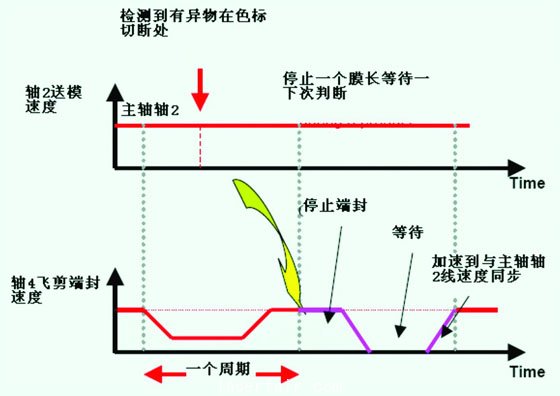
图4 轴4运动控制时序图
轴4部分程序(防切):
IF#IB0B000=1 //如果sensor2检测到有异物
MOVELINK [J04]#DL0000 [J02]10 A0 D10
//轴4减速到停止位
MOVELINK [J04]0 [J02]#DL001A A0 D0
//轴4等待
MOVELINK [J04]5 [J02]10 A10 D10
//轴4加速到与主轴2线速度同步
ENDIF
结语
经过现场测试后,当系统采用2把飞剪端封滚刀,系统最大速度可以稳定达到200包/分钟,如果采用单把飞剪端封滚刀,系统最大速度可以稳定达到120包/分钟。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

