





引 言
MAV由于体积和负载能力极为有限,因此,减小和减轻飞控导航系统的体积及重量,就显得尤为重要。本文基于MEMS加速度传感器,设计一种双轴倾角计,该装置精度高、重量轻,可满足MAV的姿态角测量要求,也可用于其他需要体积小、重量轻的倾角测量设备上。
MEMS加速度传感器
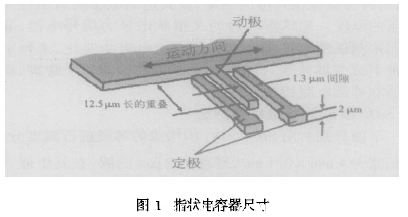
ADXL202是最新的、低重力加速度双轴表面微机械加工的加速度计,以模拟量和脉宽调制数字量2种方式输出,并具有极低的功耗和噪音。表面微机械加工使加速度传感器、信号处理电路高度集成于一个硅片上。和所有加速度计一样,传感器单元是差动电容器,其输出与加速度成比例。加速度计的性能依赖于传感器的结构设计。差动电容是由悬臂梁构成,而悬臂梁是由很多相间分布的指状电容电极副构成,一副指状电容电极可简化为图1所示的结构。每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m 的物体,因受力F而产生加速度a,则F =m a。而弹簧的形变与所受力的大小成比例,即F = kx,所以
x = (m / k) a ,
式中 x为位移, m; m 为质量, kg; a为加速度, m / s2 ; k为弹簧刚度系数, N /m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以, 减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂梁更坚固。所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和Y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高了ADXL202的分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X 轴和Y轴的灵敏度耦合减小到最小。
倾角测量原理
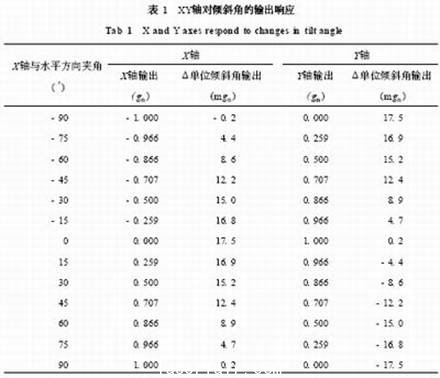
ADXL202用于倾角测量是最典型的应用之一,它以重力作为输入矢量来决定物体在空间的方向。当重力与其敏感轴垂直时,它对倾斜最敏感,在该方位上其对倾角的灵敏度最高。当敏感轴与重力平行时,每倾斜1 °所引起输出加速度的变化被忽略。当加速度计敏感轴与重力垂直时,每倾斜1 °所引起输出加速度的变化约为17. 5mgn ,但在45°时,每倾斜1 °所引起输出加速度的变化仅为12. 5mgn ,而且,分辨力降低。表1为X, Y轴在铅垂面内倾斜±90 °时,X, Y 轴的输出。
当该加速度计的X, Y轴都与重力方向垂直时,可作为具有滚转角和俯仰角的双轴倾角传感器。一旦加速度计的输出信号被转化为一个加速度, 该加速度将位于- 1 gn 和+ 1 gn 之间。则倾斜角以度表示可按下式计算
θ= arcsin (AX / gn )
γ= arcsin (AY / gn ) ,
式中 θ,γ分别为俯仰角和滚转角, ( °) ; AX , AY 分别为加速度传感器X轴和Y轴输出, gn。
倾角测量电路
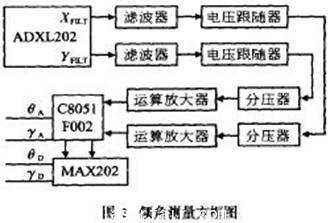
测量电路方框图如图2所示, ADXL202输出的电压首先经低通滤波器虑波,再经电压跟随器进行阻抗匹配。当X, Y轴均处于水平位置时,两路输出电压经分压器分压后为1. 2V,当X, Y轴分别从- 90°转到+ 90°时,经过放大后的电压从0V变到+ 2. 4V,以适应单片机C8051F002的A /D转换器的需要,然后,用单片机进行线性化处理和温度补偿,分别以模拟量从D /A转换器DAC0,DAC1输出,并以θA 表示俯仰角的模拟量输出,γB 表示滚转角的模拟量输出;同时,俯仰角和滚转角转换为数字量从串行口RS232以数字量度输出,分别为θD 和γD。
实验结果
在倾角计线性化和温度补偿后,进行了量程范围内的测量,所用设备为三坐标测量仪工作台作为水平基准,200mm正弦规及千分块规作为角度发生器产生基准角度,通过串口连接倾角计于计算机显示倾角计所测角度。由于三坐标测量仪工作台的水平度及正弦规和千分块规所产生角度精度足够高,认为所产生的角度误差极小,可作为角度的期望值。测量结果如表2所示。
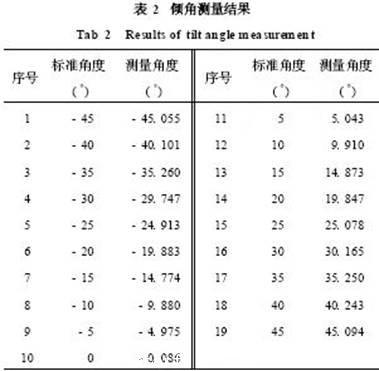
从表2可以算出:倾角最大误差为- 0. 26°~0. 25°,而平均角度误差为±0. 135°, 分别为满量程的0. 57 %和0. 30 %。

结 论
本文利用MEMS双轴加速度传感器设计的双轴倾角计,体积小、重量轻(约10 g) ,线性化及温度补偿后的测量结果表明: 在测量范围±45°内, 最大误差为满量程的0. 57 % ,平均误差为满量程的0. 30 %。
该倾角计很好地满足了MAV姿态控制时滚转角、俯仰角测量要求。同时,该倾角计也可以用于要求体积小、重量轻的其他测量设备上。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

