





1 引言
随着材料技术、电力电子技术、控制理论技术、计算机技术、微电子技术的快速发展以及电机制造工艺水平的逐步提高,交流伺服技术-交流伺服电机和交流伺服控制系统已经成为工业领域实现自动化的基础技术之一,并将逐渐取代直流伺服系统。目前,交流伺服系统的智能化、网络化控制是交流伺服控制的两个重要发展方向。
在济钢asp1700薄板坯连铸连轧项目中,连铸机结晶器调宽系统采用了基于profibus总线的全数字智能化交流伺服控制系统,是当今世界最先进伺服控制技术。
2 连铸机结晶器调宽工艺
济钢第三炼钢厂asp1700薄板坯连铸连轧结晶器采用直结晶器,由两个宽面和两个窄面构成,长1200mm,内腔厚度最宽150mm,调宽范围:100mm~150mm。其中窄面是可以活动的,以便在连铸机准备和浇注期间调节结晶器的宽度和锥度(图1)。结晶器采用一组拉杆夹紧两个宽面和两个窄面,拉杆通过弹簧组保持夹紧力,拉杆上的液压缸可以在调宽过程中压缩弹簧,以使窄面能容易移动,快速打开宽面。液压缸压力可连续调节,随板坯的宽度变化来调节夹紧力,实现软夹紧。由于该压力不是夹紧宽面,因此在液压压力失效时,弹簧能够保持夹紧力而不会有危险。
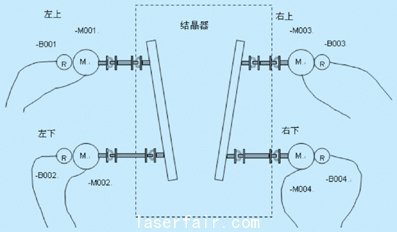
图1 结晶器窄面机械结构
结晶器调宽系统包括:4套丝杠机构,每个窄面2套;4套带有旋转变压器的交流异步伺服电动机,固定在浇注平台下的冷却室外;4个万向轴、4套交流伺服控制单元。结晶器调宽窄面控制机械结构,如图1所示。每一个窄面使用伺服单元控制调宽电机驱动,可以改变两边宽度和每个面的锥度。由于调宽时生产的板坯窄面不是直的,这意味着在调宽期间窄面铜板与坯壳之间的气隙的产生,避免漏钢,在调整宽度的同时必须调整锥度。为了减小凝固坯壳的应力,窄面的调整应缓慢进行。为保证坯壳与铜板紧密接触,结晶器锥度随宽度的减小而减小,随宽度增加而加大。控制系统根据钢种、浇注速度、要求的锥度和板坯定尺,在浇注期间为各边的运动选择不同的算法。
3 结晶器调宽控制系统
结晶器调宽控制系统采用西门子s7-400plc,伺服单元选用西门子masterdrives mc全数字运动控制器,具有过载能力大,调速范围宽等特点,设有tp270人机界面,可设定和故障监视功能。每个伺服电机自有一套伺服单元,采用位置环、速度环、电流环三环控制,是一种高动态响应、高精度的运动控制方式。传动系统经profibus总线和plc及tp270相连。伺服电机采用伦兹(mdskars090-22)三相交流异步伺服电动机,功率2.6kw,额定速度2300rpm。生产工根据生产钢种结晶器宽度、锥度设定值输入到人机界面上,经profibus总线传输给调宽 plc,plc运算后,给各个伺服单元发出位置控制信号,伺服单元将伺服电机旋转变压器信号换算出的实际位置信号和实际速度信号分别作为位置环反馈信号和速度环反馈信号实现三环控制,而使系统快速平滑地跟随位置设定值,保证结晶器上下口电机的恒定速度差,实现窄面铜板的精确定位。整个控制系统是以伺服电机电流环、电机速度为内环,窄面铜板位置为外环的三环控制结构,系统精度高,速度响应快,运行平稳可靠,定位准确,调宽控制系统结构见图2所示。

图2 结晶器调宽自动控制系统
4 关于profibus现场总线
4.1 现场总线的定义及特点
现场总线,按照国际电工委员会iec/sc65c的定义,是指安装在制造或过程区域的现场装置之间、以及现场装置与控制室内的自动控制装置之间的数字式、串行和多点通信的数据总线。以现场总线为基础而发展起来的全数字控制系统称作fcs。
现场总线作为连接控制系统中现场级装置和控制设备的双向数字通信网络,与传统的dcs系统相比其优点是明显的:增强了现场信息的集成能力;抗干扰能力增加、系统可靠性提高;安装便捷、可维护性好;具有开放性、互操作性、互换性、可集成性;降低了工程成本;具有ip67防护等级,可现场安装;能自动诊断故障部位。
4.2 profibus总线的特点
profibus是一种国际化、开放式、不依赖于设备生产商的现场总线标准。广泛适用于制造业自动化.流程工业自动化和楼宇、交通电力等其他领域自动化。中央处理器(如plc/pc)通过高速串行总线同分散的现场设备(如i/o、变频器、阀门)进行通讯,多数数据交换采用周期方式。 profibus-dp是用于现场设备级的高速数据传输,通讯介质采用屏蔽的双绞铜线电缆,共用一根导线对,通讯速率可选用 9.6kbps~12mbps,通讯距离可达12km。profibus总线的通信能力强,与变频器的通信最多可有10个字的通信能力。
4.3 profibus-dp的数据通讯格式
profibus-dp总线方式允许在plc和传动装置(变频器、运动控制器)之间进行快速的数据交换。对传动装置的存取总是按照主——从方式进行的,传动装置总是从站,且每个从站本身都有明确的地址。profibus周期性传输的报文结构如图3所示。

图3 profibus-dp报文结构
4.4 profibus-dp的可用数据
对于传动装置可用数据区被划分成2个数据区,它们以各自的报文进行数据传送:
(1) 过程数据区(pzd)
控制字和设定值或状态字和实际值;
(2) 参数区(pkw)
用于读写参数,读出故障信息等。pkw和pzd共有五种结构形式即:ppo1、ppo2、ppo3、ppo4、ppo5,其传输的字节长度及结构形式各不相同。根据自动化网络中传动装置的任务不同,在plc和变频器通讯方式配置时要对ppo进行选择。在结晶器调宽交流伺服控制系统中采用了 ppo5型通讯报文,它的报文结构如图4所示。图4中符号的意义如下:
pkw:参数标识符;
pzd:过程数据;
pke:参数标识符;
ind:索引;
pwe:参数值;
stw:控制字;
zsw:状态字;
hsw:主设定值;
hiw:主实际值。
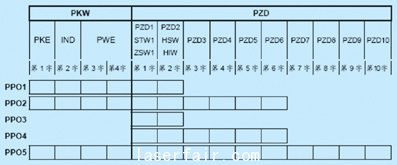
图4 ppo的报文结构
5 基于profibus的交流伺服控制系统硬件组成
5.1 plc系统
结晶器调宽plc系统作为连铸机l1系统的一个子系统,其系统设计本着可靠、先进、开放的原则,综合考虑系统的性能价格比,根据工艺方案和机械设备条件,系统结构尽可能统一,同时应与其它l1级子系统保持一致。连铸l1级plc系统选用的是siemens s7-400系列plc。根据调宽工艺性能要求,plc系统cpu 选择s7-414-3,通过cp443通讯模块与l1级工业以太网通讯,也可以通过profibus-dp接口与mc运动控制器和tp270通讯。#p#分页标题#e#
5.2 人机界面
根据工艺特点及现场环境,结晶器调宽人机界面选择tp270操作面板。tp270属于simatic hmi(人机界面)产品系列中文本图形触模式操作面板,在性能上有以下特点:
(1) 简单快速配置,配置数据是可以恢复的;
(2) 可用标准windows工具进行配置;
(3) 使用软键、功能键或触模控制,简化了操作,也保障了操作的安全性,易于使用;
(4) 和西门子plc完美结合,使整个系统在硬件和软件均达最优化,尤其是通讯支持profibus-dp总线协议。
5.3 mc控制器
结晶器调宽伺服控制器选用的是西门子公司masterdrives mc运动控制器,该控制器是应用于高动态响应循环机械控制的控制器,是完全智能化的控制系统。mc控制器有以下特点:
(1) 高动态响应,高过载能力
mc驱动器使用了32位dsp数字控制技术,dsp器件内部具有功能强大的硬件计算电路和特殊的总线结构,具有强大的数字信号处理功能;mc运动控制驱动器同时具有极高的过载因数,250ms内300%的过载能力。
(2) 通用性强
它能够控制任何型号的电机,具有的模块化、插入式可选编码器功能模板可以完成所有的驱动任务,有支持脉冲编码器(ttl/htl)的sbp 板,支持旋转变压器的sbr2板,支持多圈编码器(eqn,eqi, endat/ssi或sin/cos)编码器的sbm2板,都可以非常容易地与系统相连接。
(3) 强大的通讯能力
mc运动控制驱动器具有支持各种现场总线的可选模板,这些接口模板的设置,显著地增强了伺服单元与其它控制设备间的互联能力。mc运动控制驱动器的各种通讯模板中有支持profibus总线的cbp2板,profibus-dp是当今世界上最为成功和流行的现场总线标准,在 profibus cbp2功能模板上实现同级模块之间相互通讯,尤其在西门子产品系统集成中,更显示其优点。
6 交流伺服控制系统硬件配置
在交流伺服控制系统中,plc硬件组态、编程使用step7 v5.3,step 7是用于simatic可编程逻辑控制器组态和编程的标准软件包;系统操作界面tp270使用protool进行组态及编程,protool是用于可视化过程的使用简单、高性能的可视化软件,可在 windows95/98,2000下运行。
6.1 组态plc主站系统
(1) 在plc项目ccm2下新建项目plc-3(nwa-ccm1),点击右键,在弹出的菜单中选择“insert new object”下“simatic 400 station”,插入s7-400站;
(2) 组态硬件:双击“hardware”选项,进入“hw config”窗口,点击“catalog”图标打开硬件目录,按硬件安装次序和订货号依次插入机架、电源、cpu、通讯模块、两块输入、输出模块;
(3) 插入cpu模块后会同时弹出profibus组态界面,新建profibus命名为profibus_plc3,地址定义为2,点击 “properties”按钮组态网络属性,选择”network settings”进行网络参数设置,profibus的传输速率为 “1.5mbps”,行规为“dp”;
(4) 在plc的profibus属性operation mode中将其设为dp master。
6.2 mc运动控制器的profibus从站组态
(1) 组态从站
在dp网上连接mc运动控制器,选择“motion control plus”,连接到dp网络上,然后组态drive的通讯区,见图5所示,定义profibus站地址,为3号站;

图5 选择mc控制器
(2 )通讯区定义
plc与mc控制器之间除了传输设定值和控制字外,还需要传送其它数据,需要选择多个pzd,通讯需要9个字,选取ppo-typ5,pkw+pzd-10/10,如图6所示。
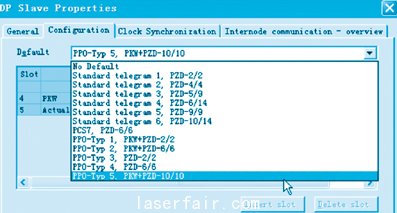
图6 mc控制器通讯区定义
(3) 数据区定义
pkw数据区为:piw 512-519 pqw 512-519
pzd数据区为:piw 520-539 pqw 520-539
(4) 按照以上步骤,分别组态2#mc,3#mc、4#mc到dp网络,dp地址分别是4、5、6,并分别定义各子站的pkw、pzd数据:
2#mc(4#站):
pkw数据区为:piw 540-547 pqw 540-547
pzd数据区为:piw 548-567 pqw 548-567
3#mc(5#站):
pkw数据区为:piw 568-575 pqw 568-575
pzd数据区为:piw 576-595 pqw 576-595
4#mc(6#站):
pkw数据区为:piw 595-603 pqw 595-603
pzd数据区为:piw 604-624 pqw 604-624
6.3 tp270的profibus从站组态
(1) 在项目ccm2下新建项目tp270_moldwidh_ adjust,点击右键,在弹出的菜单中选择“insert new object”下“simatic op”,插入tp270站;
(2) 双击tp270_moldwidth_adjust项目,进入protool编程环境,选择操作面板tp270;
(3) 输入调宽系统plc的名称plc_3,选择sim- atic s7-300/400 v6.0协议;
(4) 点击“parameters”按钮,进行参数设置,连接op到网络的方式,是选择plc_3网络,dp地址选择1,使用路径方式,如图7所示。

图7 tp270 通讯参数定义
7 交流伺服控制系统软件应用
7.1 plc数据profibus传输编程
step7 v5.3有两个sfc块“dprd_dat”和“dpwr_dat”,用于profibus主站和从站之间的的数据传输。交流伺服控制系统中,应用dp通讯传输命令“dprd_dat”和 “dpwr_dat”把数据传输到mc控制器的通讯区pzd数据区piw内,同时把mc控制器的pzd数据区pqw数值读到profibus-dp传输的db块中。1#mc控制器的profibus控制命令的传输应用程序如下:
call "dprd_dat" ;调用dp读命令
laddr :=w#16#208 ;起始地址
ret_val:="top_left_comdata".recieve_ret
record :=p#db31.dbx20.0 byte 20
;目标数据地址
call "dpwr_dat" ;调用dp写命令
laddr :=w#16#208 ;起始地址
record :=p#db31.dbx0.0 byte 20
;目标数据地址
ret_val:="top_left_comdata".send_ret
7.2 mc控制器通信参数定义
使用过程数据区,实现控制字和设定值(任务:主站 变频器)或状态字和实际值(响应:变频器主站)的传输。只有当控制字、设定值和状态字实际值依照“过程数据连接”规定的路径连接时,该过程数据的传输才有效。在mc控制器通信参数应用分为两个部分:mc控制器接受plc的控制字和设定值和mc 控制器返回给plc的状态字和实际值两部分。
(1) 过程数据输出区在mc控制器的传输格式
过程数据输出区pzd1-pzd10和mc控制器的寄存器变量k3001-k3010是一一对应的关系,可以根据需要定义双字节数据,在该系统实际应用中,分别用k3007和k3008构成一个双字节数据,用k3009和k3010构成一个双字节数据。
(2) 过程数据输出区在mc控制器应用
在实际应用中,mc控制器主要应用过程数据输出区数值定义以下参数:
p554=k3100 装置控制字
p565.1=k3107 装置复位控制
u710.003=k3202 位置控制信号启动
u710.004=k3203 位置控制信号清除剩余位
u710.026=k3309 位置控制信号点动后退
u710.027=k3310 位置控制信号快慢速选择
u710.028=k3311 位置控制信号点动前进
u710.029=k3312 位置控制信号模式选择控制1#p#分页标题#e#
u710.030=k3313 位置控制信号模式选择控制2
u710.031=k3314 位置控制信号模式选择控制3
u710.032=k3315 位置控制信号模式选择控制4
u531=k3006 g功能mdi使能
u532=k3037 位置控制信号
u533=k3039 速度控制信号
(3) 过程数据输入区在mc控制器的传输格式
过程数据输入区pzd1-pzd10和mc控制器的参数p734.1-p734.10是一一对应的关系,可以根据需要定义双字节数据,在该系统实际应用中,分别用p734.2和p734.3构成一个双字节数据,p734.7和p734.8构成一个双字节数据。
(4) 过程数据输入区在mc控制器的实际应用
在实际应用中,mc控制器主要定义以下参数进行过程数据输入区数值传送:
p734.1=k32 装置状态字
p734.2=kk120 位置实际值
p734.3=kk120 位置实际值
p734.5= k22 电流实际值
p734.6= k433 运行综合信号
p734.7= kk91 速度实际值
p734.8= kk91 速度实际值
8 结束语
交流伺服控制在济钢连铸机结晶器调宽系统的成功应用,实现了济钢1700连铸-连轧系统不停机改变铸坯断面的要求,从而为铸坯热装和直接连轧创造了条件,充分满足了轧钢每个单元内多规格的要求,大大提高了连铸及连轧的生产能力和增加金属收得率。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

