





摘要:该文以最常用的关节型六自由度焊接机器人为例,概述了控制系统的结构组成,强调阐明焊接系统与焊接参量与通用关节型机器人的实用计算机接口,并对现代焊接机器人的人机界面做了综合性的简介。
关键词:关节型通用机器人;运动自由度;焊接系统接口;离线与在线编程;3D动画示教与编程
作为焊接机器人的用户,为正确选择、合理使用并做到能常规维护焊接机器人,必须对焊接机器人的运动控制系统有一定层次的了解。
焊接机器人是装上了焊钳或各种焊枪的工业机器人。工业机器人的运动控制系统涉及数学、自动控制理论等,内容很多。要在较短的篇幅中,全面而系统地介绍工业机器人的运动控制系统,实在是非工业机器人控制专业人员所能及的事情,因此,本章内容是从焊接机器人的用户角度出发,尽量以图代解、简明地阐述有关机器人运动控制系统(见图1)的一般性问题。

1 焊接机器人运动轴的构成
1.1 焊接机器人运动轴的定义
点焊与弧焊两种机器人都是由典型6关节型(也称6轴)工业机器人装上焊钳或焊枪而构成,因此,讨论焊接机器人运动系统构成,亦即讨论典型6关节工业机器人的运动系统构成。顾名思义,典型6关节工业机器人有6个可活动的关节,每个关节的运动名称都有定义,在图2中,给出了典型6关节工业机器人各关节的编号与动作状态(编号后面的英文大写字母就是规定动作英文名称的第一个字母),每个关节的运动都由一个伺服电(动)机驱动,每个电机都有各自的伺服控制系统。机器人最后“手”关节上所安装的工具中心点(TCP)(对点焊钳与电焊枪的TCP点,在相应的机器人结构中都作了规定)的运动轨迹是多个关节伺服系统协同动作的结果。而机器人运动控制系统( 器)的作用就是如何根据编程指令来指挥控制6个伺服电(动)机协同动作,以完成工具中心点所要求实现的运动轨迹。
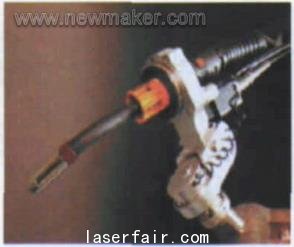
图2 新开发的带内置回转摆动轴的FlexTorch机器人焊枪系统
1.2 焊接机器人的运动轴参数
焊接机器人的运动轴参数主要包括:各轴最大运动范围、最大速度、相关轴的容许转距、相关轴的容许惯性力矩等。一种典型的6关节型工业机器人的关节运动参数的量值见表。
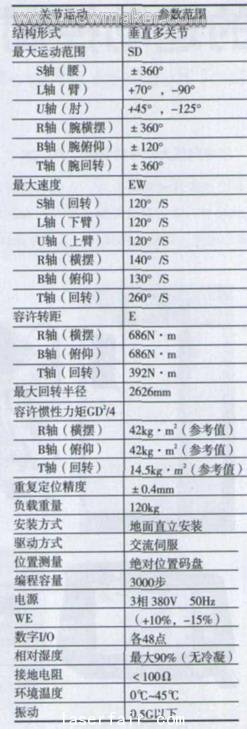
可以看出:6关节型工业机器人的运动轴参数不仅涉及各轴本身,也最终决定整台工业机器人的性能。其中,最重要的性能指标是:重复定位精度和负载重量。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

