




本文作者:Ivan Nikitskiy(欧洲光子学产业联盟)
激光制造网 编译
微电子和传感器,尤其是激光雷达传感器在自动驾驶和自动驾驶汽车领域发挥着关键作用。这些技术的市场潜力巨大,人们不由猜想:未来两年内,汽车激光雷达市场的规模将翻一番。
安全是汽车行业最为关心的问题,因此必须为高级驾驶员辅助系统和自动驾驶车辆部署高价值和高性能激光雷达系统。为此,现有的挑战围绕着激光雷达传感器设备的巨大尺寸、重量和功耗。鉴于车辆平台内的这些限制,迫切需要进一步实现激光雷达系统的小型化,同时提高其功能和资源效率。虽然当前的激光雷达系统通常安装在车辆外部,但其目标是将这些设备无缝集成到车身部分,如保险杠、格栅或车外灯。
自2020年以来,汽车供应商Marelli与15个合作伙伴共同参与了欧盟1000万欧元的TINKER项目,该项目旨在创建一种价格合理且资源高效的方法,使用纳米压印光刻方法生产雷达和激光传感器封装。Marelli对TINKER的贡献是将紧凑型激光雷达系统集成到车辆的活动空间。例如,传感器布置必须提供全面的水平和垂直视野(FOV),并尽量减少盲点。此外,它必须最大限度地覆盖周围环境,并考虑到汽车后视镜、玻璃窗和薄柱子的任何复杂遮挡。其他工程挑战包括最小化成本、形状因素以及天气和环境条件对激光雷达性能的影响;工程师还必须平衡距离、精度和分辨率,并将激光雷达与其他传感器和实时数据处理进行校准和同步。
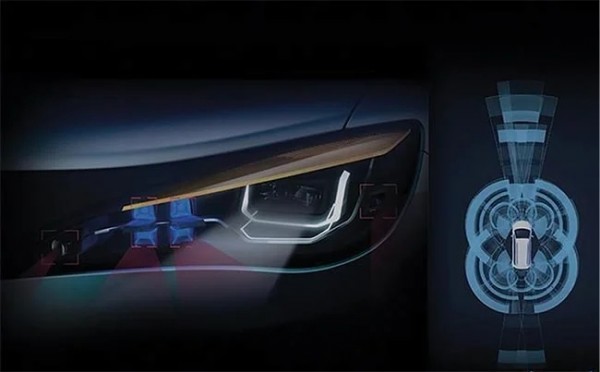

Marelli的智能角落解决方案,用于在汽车前照灯中放置集成激光雷达。(由Marelli提供)
关于在汽车上的位置,在未来十年内,标普全球/IHS Markit激光雷达数据库的2023年数据显示,汽车的中前部和前角明显受到青睐。与安装在车顶或挡风玻璃上的系统相比,前角解决方案具有几个优点。这在一定程度上是因为有足够的空间容纳更多的激光雷达传感器,标普预测到2035年,激光雷达传感器的数量将从24个增加到35个。前角位置还提供了更好的FOV调平选项,最大限度地减少暴露在外部条件下,优化美学集成,并结合了清洁、加热和布线系统。
因此,Marelli开发了智能角落解决方案,其中前照灯、尾灯和车辆前格栅包含面板,作为传感器、雷达和激光雷达摄像头以及照明设备的主机。该系统可以更早地识别物体,并提供比以往任何时候都大的视角。
设计和仿真
要开始构建集成激光雷达系统,必须首先考虑具体的设计,然后对其进行模拟。25年来,总部位于柏林的VPIphotonics已成为光子设计和分析集成和互操作模拟软件工具的市场领导者。这些工具包括VPI transmission Maker光学系统和VPI component Maker光子电路,它们支持分层设计架构。这些工具经过设计,可以无缝地一起使用。
VPI transmission Maker光学系统是数据通信和电信行业的支柱,在应用于激光雷达技术时显示出显著的相似性,部分原因是最近对自由空间光通信的支持进行了升级。新增强的自由空间光通道模型支持大气条件建模,包括天气、海拔、风速等。
VPI component Maker光子电路工具适用于激光雷达应用中光子集成电路(PIC)的更详细物理级建模。该工具包括无源和有源元件的模型,例如分布式反馈或分布式布拉格反射激光器和光学相控阵。这些组件可以在PIC内互连,以实现使用环形谐振腔部分进行调谐的广泛可调谐混合III-V/硅激光器的功能。该软件允许组合不同的材料平台来设计和模拟PIC,便于在实际制造过程开始之前进行灵敏度分析,以调查制造公差。

尽管外观简单,但Ommatidia的高分辨率3D激光雷达相机是基于一个由数十万个类似昆虫眼睛的小眼类感光细胞组成的传感器。(由Ommatidia提供)
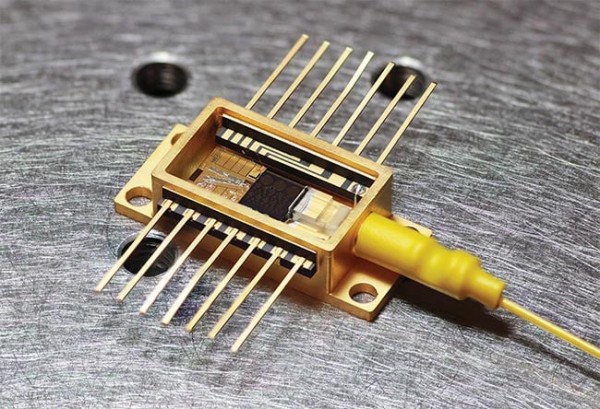
用于调频连续波(FMCW)激光雷达系统的DeepLight混合集成激光器基于氮化硅和MEMS驱动器。(由DeepLight提供)
例如,对于调频连续波(FMCW)激光雷达的系统级模拟,该软件可以使用简单的三角波形调频激光器对发射机进行建模。然后将信号分为探测信号和参考信号。探测信号通过循环器和自由空间光通道模型传输,从而能够分析各种大气条件对信号衰减的影响。此外,如果目标正在移动,则可以考虑多普勒频移。然后,信号通过光通道和循环器反射回来,在那里它与参考信号合并以进行平衡光电检测。这一过程允许对距离和速度测量性能的不同损伤进行系统研究。
激光雷达结构
西班牙的Ommatidia lidar提供了一个集成激光雷达架构的有趣示例。其目的是解决现有激光雷达结构的一个基本性能限制,即它们将光发射限制为短脉冲或将光子集中在特定方向。这会限制可用于返回信号的光子数量,从而限制范围和分辨率。
为了解决这些问题,Ommatidia开发了远程、高分辨率3D激光雷达相机,该相机基于由数十万个类似小昆虫眼睛的感光细胞组成的传感器。该设计能够发射和检测更多的光子,以及前所未有的范围和分辨率。这种新颖的仿生灵感构建允许使用整个场景的连续宽幅照明,并首次在3D成像中安全使用高功率照明。
Ommatidia的激光雷达方案基于FMCW激光雷达系统,该系统通过将低功率采样信号与高功率本地振荡器信号混合放大来提供相干和平衡检测。这提供了单光子灵敏度、有限的散粒噪声和高距离精度。此外,仅混合共享相同频率调制的信号可确保对太阳辐射干扰的免疫力,而振幅和相位检测则通过光学混频器进行。
Ommatidia的Q1相机有128个平行通道,可以在高达50米的高度提供计量级测量。该设备包括成像测振功能,可以以非接触方式显示结构的动态,而无需昂贵的仪器。该系统设计用于室内和室外的现场使用,具有IP54防护和坚固的组件。下一步是通过解决其可扩展性,将该技术引入新市场。
激光源需要考虑的事项
激光雷达的激光源是一种快速发展的组件技术。例如,瑞士初创公司DeepLight正在开发混合集成激光器,该激光器利用氮化硅和MEMS驱动器,用于基于相干检测的汽车FMCW激光雷达系统。该方法使系统能够以高灵敏度测量物体速度,并且在大于200米的长距离范围内干扰最小。
然而,该技术需要窄线宽激光器和高啁啾线性度,这是一个主要缺点。作为回应,DeepLight正在基于超低损耗氮化硅平台开发更易于控制的高性能激光器。
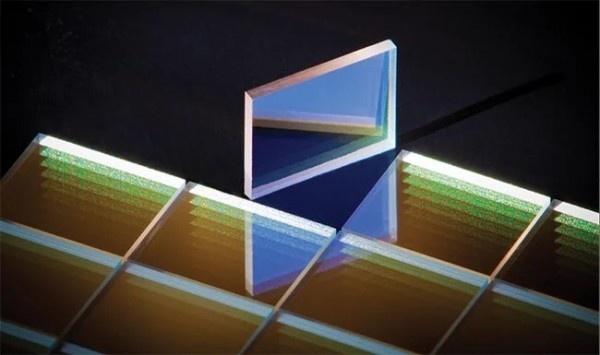
VIAVI解决方案用于激光雷达系统的氢化硅(Si:H)滤波器的示意图。(由VIAVI Solutions提供)
该解决方案基于三种技术。第一种是多波长半导体激光器的混合集成,其中包括由直接带隙III-V化合物制成的增益元件。其次,为了实现比光纤激光器低10倍的噪声,DeepLight正在利用超低损耗氮化硅来提高激光器的光谱纯度。第三个组成部分是基于MEMS的致动器的使用,该公司将其与氮化硅单片集成,以实现数十兆赫范围内的致动范围。
使用这三种技术模块,DeepLight为其系统探索了三种不同的激光架构:分布式反馈/法布里-珀罗二极管的自注入锁定;扩展分布式布拉格反射激光器;以及外腔激光器。
DeepLight原型的性能看起来令人印象深刻。其中一个在高达100 kHz的扫描速率下表现出0.1%的均方根非线性,没有任何线性化或失真,这是时间分辨外差拍频测量的理想选择。凭借这一性能水平,DeepLight的技术非常适合用于激光雷达和其他广泛的应用。
激光雷达光学滤波器
光学滤波器是大多数集成激光雷达系统的另一个重要组件。光学滤波器可以阻挡因光线条件变化或迎面而来的前照灯反射而产生的不需要的信息。这种情况会影响激光雷达准确检测和测量周围物体的能力,这使得光学滤波器对于确保系统只从所需波长的光中收集正确的数据至关重要。
光学滤波器必须在各种变化的光照条件下可靠工作,虽然滤波器可能是激光雷达系统中最便宜的部件,但其设计和性能对传感器性能有很大影响。许多为激光雷达应用设计的滤波器基于交替的低折射率层和高折射率层,以产生干扰并适当滤光。
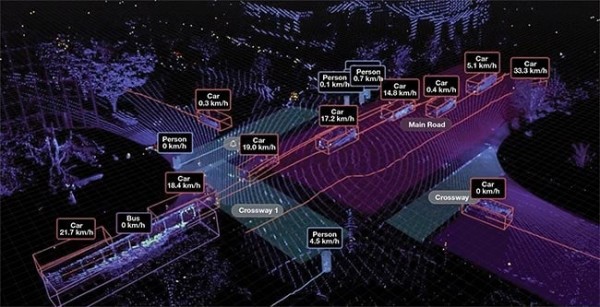
软件开发人员Outsight的3D激光雷达数据处理解决方案可以跟踪人或车辆,以分析模式,并在达到特定阈值时向最终用户发出警报;它可以检测到特定位置的产能过剩、交通瓶颈,甚至容易发生近距离事故的十字路口。(由Outsight提供)
VIAVI Solutions是美国领先的激光雷达开发商滤光器供应商,其产品组合中采用了氢化硅(Si:H)制造的产品。
当用作高折射率材料时,Si:H有两个主要优点。首先,它的高折射率支持低成本系统。其次,与用传统材料构造的带通滤波器相比,那些利用Si:H的滤波器可以减少光线在增加入射角时的蓝移。此功能增加了可用带宽,从而减少了总体所需的带宽。
随着激光雷达行业引入第二代产品,其成本和性能变得更加重要。因此,需要窄带宽系统在不显著增加成本的情况下提供更好的信噪比。因此,VIAVI正在研究新的概念,以提高其光学滤波器的制造公差。如果成功,该公司可以将激光雷达系统所需的滤波器带宽减少多达60%,同时提高传感器性能并保持可管理的成本。
其他应用领域
尽管激光雷达在过去10年中主要专注于汽车平台,但该技术已开始在汽车以外的应用领域释放巨大机遇。其中包括监控人群或交通模式,以提高这些人口密集环境的安全保障。
Outsight成立于2019年,总部位于巴黎,为这一领域提供3D激光雷达处理软件。例如,在机场航站楼或火车站,该技术可以使用唯一的ID跟踪每个人及其行李。当达到特定阈值时,例如某个位置的产能过剩或等待时间超过可接受的最大值时,该解决方案会向这些设施的管理者发出警报。该软件可以进一步分析长时间(有时是数月甚至数年)发生的模式数据。这项技术可以应用于终端用户需要了解人或车辆如何移动或相互作用的模式的任何位置。例如,可以对道路交叉口进行监控,以检测未遂事故,提醒城市管理人员可能需要制定加强的事故预防措施。
对于Outsight,大规模监控激光雷达系统的两个主要需求驱动因素是,与相机相比,该技术的成本越来越低,性能越来越高。例如,在机场环境中,四个360°视场的激光雷达系统可以提供比30个摄像头更多的数据和更大的覆盖范围。选择激光雷达的类型、范围和覆盖范围取决于应用程序的需求以及客户的预算。
确定最佳配置可能很复杂。作为回应,Outsight开发了一款3D激光雷达模拟器,该模拟器考虑了应用需求以及每个传感器的特定功能和特点。该解决方案可以帮助确定激光雷达型号和制造商的最佳组合,以及如何最佳定位它们。
另一个复杂的领域是如何将系统产生的大量原始数据转换为可操作的智能。Outsight的解决方案是实时计算关键性能指标,这些指标可以直接显示在仪表板或任何与API连接的系统中,该公司制造的系统与95%的现有激光雷达品牌和型号兼容。
结论
由于在更集成的系统、更好的模拟工具以及不断改进的激光源和滤光器方面取得了突破,汽车应用的集成激光雷达技术在性能和成本方面不断发展。从更紧凑的系统到受生物启发的传感器架构,激光雷达的发展展现了技术进步的融合,有望重塑汽车和其他行业。而且,随着激光雷达的创新不断展开,它的提升将为未来铺平道路,在未来,精确高效的环境传感将成为各个领域不可或缺的一部分。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读




















 关注我们
关注我们

