




激光三角漫反射位移传感器用于测厚有明显优点:
-非常小的测量光斑,是点光面积,如真尚有公司ZLDS10X系列光斑面积约1mm,它比面积型非接触电容、电涡流传感器,对被测体面积几乎无要求,适合测量非常小面积尺寸厚度;
-较远的测量范围起始间距。它比非接触电容、电涡流传感器起始间距大很多,如真尚有公司ZLDS100激光位移传感器测量量程100mm,测量间距可以达到1000mm。这样传感器可以远离被测体,免受碰坏,及被测体热辐射影响;
-有很大的测量范围,如真尚有公司ZLDS101激光位移传感器量程达2000mm,这是其它传感器很难做到的;
-与被测体材料无关,即金属、非金属体,非透明有漫反射条件表面都能测。
和其它传感器测厚一样,要实现精密测厚需要注意以下条件,否则再好的传感器也测不准:
1、用单激光位移传感器测厚
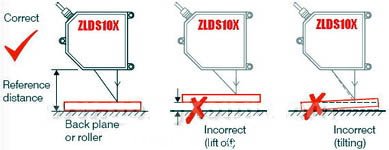
单激光位移传感器测厚示意图
被测体放在测量平台上,测量出传感器到平台表面距离,然后再测出传感器到被测体表面间距,经计算后测出厚度。要求被测体与测量平台之间无气隙,被测体无翘起。这些严格要求只有在离线情况实现。
2、 双激光传感器测厚
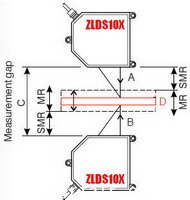
双激光传感器测厚示意图
在被测体上方和下方各安装一个激光位移传感器,被测体厚度D=C-(A+B)。其中,C是两个传感器之间距离,A是上面传感器到被测体之间距离,B是下面传感器到被测体之间距离。图中:SMR是指传感器量程起始间距,MR是指传感器量程。
在线厚度测量用这种方法优点是可消除被测体振动对测量结果的影响。但同时对传感器安装和性能有要求。
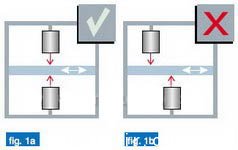
保证测量准确性的条件是:两个传感器发射光束必须同轴,以及两个传感器扫描必须同步(见本文附图)。同轴是靠安装实现,而同步要靠选择有同步端激光传感器。如真尚有ZLDS10X系列激光位移传感器都有同步端。
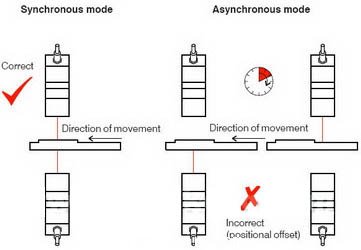
同步工作示意图
不同步将代来很大误差:如果被测体存在振动频率20HZ,振幅1mm,如果信号不同步延迟1ms,那么就会带来125µm误差。
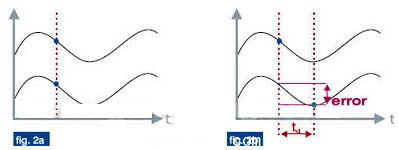
误差示意图
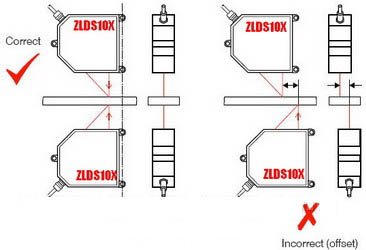
安装两个激光同轴示意图
安装使两个激光同轴,不但确保被测体同一位置上的厚度,同时降低了被测体倾斜带来的误差。以被测体运动方向不同轴为例,当不同轴1mm,被测体倾斜2°可带来35µm误差。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

