






3 牵引逆变器
3.1 牵引逆变器简述
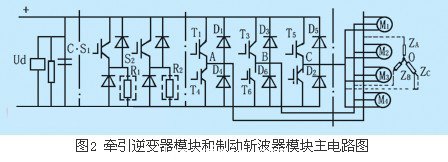
三相桥式逆变器由t1、t2、t3、t4、t5、t6组成逆变电路(直流到交流)为3300v/1200aigbt;d1、d2、d3、d4、d5、d6组成整流电路,为感性负载电流(4台电机并联,定子绕组星形连接、三相负载为za、zb、zc)提供续流回路,完成无功能量的续流和反馈。前者被称为逆变管,后者被称为续流二极管或反馈二极管。180°导通型三相桥式逆变电路每隔60°,在一周内依次导通:t1、t2、t3;t2、t3、t4;t3、t4、t5;t4、t5、t6;t5、t6、t1;t6、t1、t2。
牵引逆变器模块和制动斩波器模块主电路如图2所示。
3.2 牵引电机技术参数
按照sz1地铁列车牵引电机4eba4040(正弦电压)在58hz,150℃的等值电路的数据,可以得到网压dc1500v和dc1800v时,电机的牵引和制动特性曲线分别如图3、图4所示。
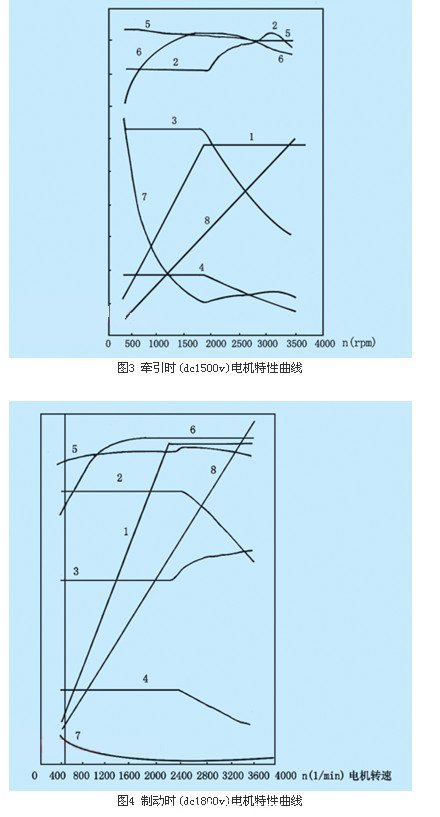
牵引电机的主要技术参数:
电机电压:u1=1150v;电机电流:i1=130a;转矩:m=1230nm;转差率:s=1.70%;定子绕组电阻:r1=0.135ω;定子绕组感抗:x1s=0.350ω;励磁绕组感抗:xh=15.47ω; 转子绕组折算感抗:x2′s=0.421ω; 转子绕组折算电阻:r2′= 0.089ω。
3.3 牵引逆变器功率模块
图5(a)为超载(aw3)时,牵引逆变器igbt逆变管和续流二极管温度曲线。此时,逆变器igbt的最高结温为105℃,续流二极管的最高结温为102℃;散热器的最高温度为76℃,环境温度为40℃。
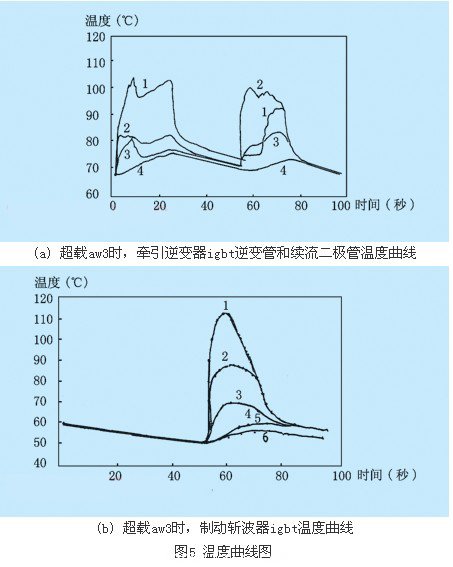
图5(b)为超载(aw3)时,制动斩波器igbt温度曲线。此时,制动斩波器igbt的最高结温112℃(100%电阻制动);igbt的最高结温87℃(50%电阻制动),环境温度40℃。
4 sz1列车牵引和制动逆变器系统控制
4.1 转矩控制模式的基本要求
(1) 采用直接转矩控制
直接转矩控制系统是近年来开发成熟应用的高动态性能交流变频变压调速系统。直接转矩控制的特点是:
·转矩和磁链都采用直接反馈的双位式band-band控制,省去旋转坐标转换,简化了控制器的结构;
·选择定子磁链作为控制对象,使控制性能不受转子参数变化的影响,这是它优于矢量控制系统的主要方面;
·直接转矩控制与矢量控制方案比较,前者调速范围不够宽,稳态机械特性也较后者差一些。但是评判优劣,只得有赖于运营实践。
(2) 牵引和制动转矩裕量
牵引和制动转矩裕量(颠覆转矩与最大牵引转矩或最大制动转矩之差)不小于20%颠覆转矩值。
4.2 列车的牵引加速和制动减速控制
(1)司机控制手柄位置给出牵引或制动转矩的大小,应从0~100%连续可调(司机牵引制动控制器tbc发出的指令信号0.5~10v(牵引/制动力)在列车试验时可以加以调整)经采样器(最小采样周期为16ms)采样和模/数变换(a/d)后,至列车控制单元vtcu在2ms时间内读取到新的牵引/制动力指令,并发送到车辆总线wtb,另一个3车单元的列车控制单元vtcu读取到牵引/制动力信号,以及将这个信号自动地发送到牵引控制单元dcu和制动控制单元bcu,完成一次列车的牵引加速和制动减速全过程(列车控制单元vtcu经多功能列车总线mvb将牵引/制动力指令信号送到牵引控制单元dcu和制动控制单元bcu,直至控制牵引逆变器和制动斩波器igbt的门极脉冲)。
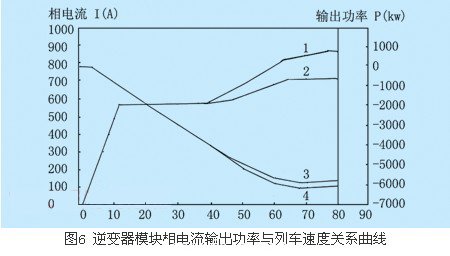
图6为制动时,牵引逆变器模块相电流、输出功率与列车速度关系曲线。从曲线中可以看出,在dc1500v/80~60km/h时,再生制动电流超过800a,输出反馈功率约5800kw;在dc1800v/80~65km/h时,再生制动电流约700a,输出反馈功率约6000kw。
(2) 加速度和减速度的控制是自动连续的
逆变器的输出电流即电机电流(牵引时为正,电制动时为负),它在逆变器的可控元件(igbt)和不可控元件(续流二极管)中交替流通,其分担比例随逆变器输出电压的高低、牵引和再生制动的工况不同而变化。
牵引时,若逆变器输出电压高,则igbt分担的电流大,若输出电压低,则分担的电流小。igbt分担的比例为50%~100%。
再生制动时,逆变器交流侧电压(即牵引电机在发电机工况时的输出电压)越高,续流二极管分担的电流越大,续流二极管分担的比例为50~100%。
sz1列车牵引和制动特性曲线如图7所示。
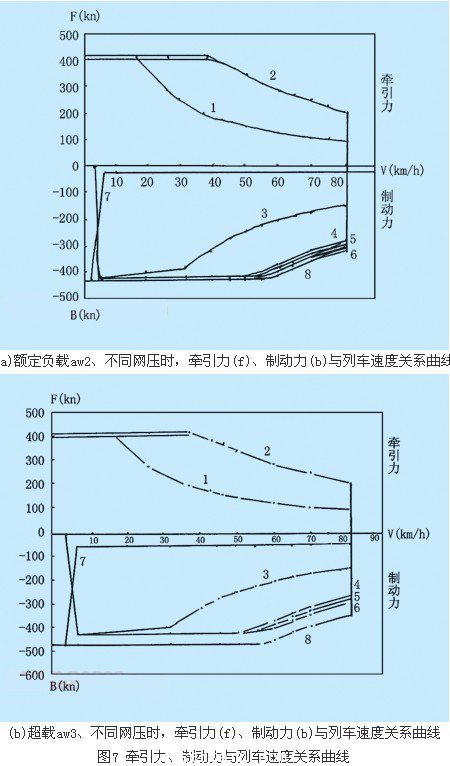
模拟条件:
·牵引时,网压dc1000v,1500v
·制动时,网压dc1000v,1500v
dc1650v,1800v
·列车最大速度:80km/h
·车轮直径:0.805m(半磨耗)
·aw2负载:342.6t
·aw3负载:377.5t
(3) 当方向/方式手柄在ato位时, 列车允许由ato装置控制, 进入自动驾驶模式,
实现牵引、巡航、惰行、制动;但司机控制器调速手柄保留快速制动功能,确保安全。
4.3 特殊运行方式
“爬行”(低速)牵引功能, 用于洗车(维持3±0.5km/h速度)。
4.4 电制动控制
(1) 在手动模式和自动驾驶模式(ato)下,对所有的速度条件下的减速控制均有效。
(2) 再生制动和电阻制动能力在额定网压和额定负荷aw2下,均能满足列车常用制动的要求。
(3) 再生制动和电阻制动的转换控制
当接触网具有接收能力时,采用再生制动;当接触网不能吸收再生能量时,再生制动部分或全部转为电阻制动。转换过程的控制应平滑,且不需空气制动介入。
5 结束语
对sz1地铁的新型逆变器系统的描述,是作者现阶段的肤浅认识,有待调试、验收、运营检验后修正和确认。因此,本文仅作信息交流,仅供参考,敬请批评指正,以便日后作专题讨论。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读
























 关注我们
关注我们

