




机器人主要由机器人本体、驱动系统和控制系统所构成。机器人本体由机座、立柱、大臂、小臂、腕部和手部组成, 用转动或移动关节串联起来, 激光加工工作头安装在其手部终端, 像人手一样在工作空间内执行多种作业。加工头的位置一般是前3个手臂自由度确定, 而其姿态则与后3 个腕部自由度有关。按前3 个自由度布置的不同工作空间, 机器人可有直角坐标型、圆柱坐标型、球坐标型及拟人臂关节坐标型4 种不同结构。根据需要, 机器人本体的机座可安装在移动机构上以增加机器人的工作空间。
机器人驱动系统大多采用直流伺服电机、步进电机和交流伺服电机等电力驱动, 也有的采用油缸液压驱动和气缸气压驱动, 借助齿轮、连杆、齿形带、滚珠丝杠、谐波减速器、钢丝绳等部件驱动各主动关节实现六自由度运动。机器人控制系统是机器人的大脑和心脏, 决定机器人性能水平。主要作用是控制机器人终端运动的离散点位和连续路径。
在选用激光加工机器人时, 主要要考虑以下几个性能参数:
1) 负载能力: 在保证机器人正常工作精度条件下, 机器人能够承载的额定负荷重量。激光加工头重量一般比较轻, 约10 ~ 50 kg , 选型时可用1 ~2 倍。
2) 精度: 机器人达到指定点的精确度, 它与驱动器的分辨率有关。一般机器人都具有0. 002 mm的精度, 足够激光加工用。
3) 重复精度: 机器人多次到达一个固定点, 引起的重复误差。根据用途不同, 机器人重复精度有很大不同: 0. 02~ 0. 6mm。激光切割精度要求高可选0. 01 mm, 激光熔覆精度要求低可选0. 1 ~0. 3 mm。
4) 最大运动范围: 机器人在其工作区域内可以达到的最大距离。具体大小可以根据激光加工作业要求而定。
5) 自由度: 用于激光加工的机器人一般至少具有六自由度。
图1是FANUC公司R-2000iB 系列6 轴机器人构成外形图, 6 个关节均为旋转关节, 6 个坐标轴对应6 个旋转关节。
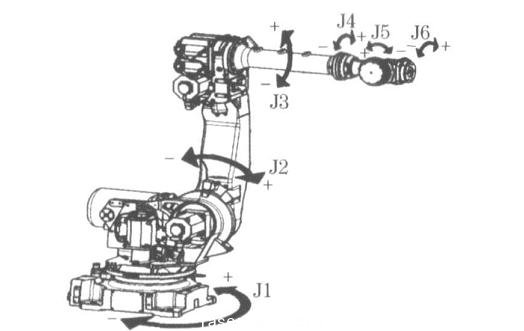
图1 FANUC R-2000iB 系列6 轴机器人
图2为FANUC公司R-2000iB 系列6 轴机器人的部分主要参数及其最大运动范围。除此之外, 机器人还有其他一些指标, 在选型时也需要考虑。如: 手腕部( J4 轴, J5 轴, J6 轴) 允许最大扭矩; 手腕部( J4 轴, J5 轴, J6 轴) 允许最大惯量;最大动作速度( J1 轴, J2 轴, J3 轴, 4 轴, 5 轴, 6 轴) ;最大动作范围( J1 轴, 2 轴, 3 轴, 4 轴, 5 轴, 6 轴) 等。
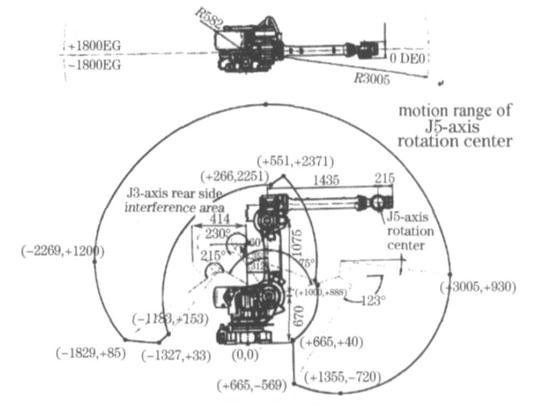
图2 FANUC 机器人最大运动范围
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读




















 关注我们
关注我们

