





雷锋网按:2007 年 11 月 3 日,6 辆汽车创造了历史,它们成功地在模拟城市环境的测试场完成了自动驾驶测试,全程都没有违反加州的交通法规。值得一提的是,这 6 辆车里,有 5 辆都搭载了新型激光雷达传感器,而提供该设备的就是 Velodyne,不过当年的它可是一家音频设备制造商。
10 年之后,Velodyne 还在延续着传奇,它的产品依然是自动驾驶汽车的核心部件。不过有一点没改变的是——激光雷达的价格,它只是从非常贵变成了相当贵,离平民化的目标还有很远一段距离。
因此,Velodyne 和大批新崛起的激光雷达新创公司现在的主要目标就是改变这个尴尬的局面。
在本文中,我们将对激光雷达技术进行一次深入剖析。除了激光雷达的工作原理,本文还会讲解它所面临的挑战,毕竟想满足自动驾驶汽车的商用要求可不容易。
一些专家相信,打造出一台售价低廉的激光雷达最关键就是将传统的旋转式机械设计换成固态设计,这样能大量减少可移动部件,激光雷达不但结构和量产简单了,成本也低了。话虽如此,但没人知道要打造一台成本低廉的车用级别激光雷达还要花多长时间。
值得欣慰的是,所有专家都对此报积极态度。为此,他们还举了大量技术进步的例子,如计算器和防抱死系统,它们的售价都从高不可攀变得非常便宜,靠的就是大规模量产。显然,激光雷达也会重复相同的路径,也就是说,激光雷达的价格不会成为阻碍自动驾驶汽车普及的绊脚石。
生不逢时的激光雷达急先锋

*Velodyne 的 64 线激光雷达为自动驾驶汽车带来了曙光
上世纪 60 年代起,科学家们就开始用激光进行测距。当时麻省理工学院的一个团队就用激光测出了地球与月球之间的距离。不过,说到车载激光雷达技术,就不得不提 Velodyne 的发明家 David Hall。
21 世纪初的 Hall 是 Velodyne 公司的 CEO(也是创始人),当时这家公司主营音频设备。但私底下, Hall 是个不折不扣的机器人发烧友。
“我们的团队当时登上了 BattleBots 和 Robot Wars 比赛(均为机器人比赛)的舞台,借口是替 Velodyne 的音响做宣传。”Hall 在接受《连线》杂志的采访时说。
因此,当孕育了互联网的 DARPA(国防部高级研究计划局)又鼓捣出一个名为 Grand Challenge 的自动驾驶汽车比赛时,Hall 决定要参与其中。
在 2004 年的比赛中,Hall 和自己的亲兄弟一起“上了战场”,他们参赛的卡车安装了两颗摄像头。不过,这样简陋的配置可不能帮助他们获胜,甚至是完成比赛。可惜,当年那次比赛没有一辆车能笑到最后。
一年后的第二届比赛中,Hall 两兄弟抛弃了摄像头方案,转而用起了激光雷达。其他团队也换上了激光雷达,不过当时市场上的产品还相当原始。
那时候,最受欢迎的激光雷达是 SICK LMS-291,它只是一套 2D 激光雷达系统,也就是说它“视力”达不到 2.0,只能“看清”世界的一部分。
这套系统能帮赛车探测到类似墙和树这样竖立在地面的障碍物,不过如果遭遇到形状不规则的障碍物,如荒废的铁道,它还是会不知所措。此外,这套系统只能探测,不能识别,它不知道自己面前的是行人还是路标。
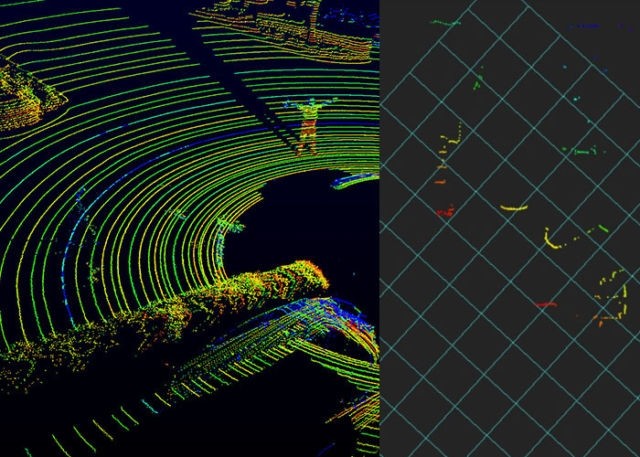
SICK LMS-291 的点云图(右)和 Velodyne 激光雷达的对比(左)
为了争取胜利,Hall 兄弟俩直接开发了新型激光雷达,他们将一台 64 线激光发射器安装在可以 360 度旋转的万向节上。这样一来,整套系统就能采集到真正的 3D 图像。
可惜的是,他们的赛车未能赢得当年的比赛,不过 Hall 兄弟俩开发的这套激光雷达却吸引了其它团队的注意力。在第三和第四届(最后一届)比赛中,Hall 成了激光雷达供应商。最后一届比赛中,6 辆完赛车辆中有 5 辆都用了 Velodyne 的激光雷达。
为什么对自动驾驶汽车来说激光雷达至关重要?

Uber 测试车用的还是旋转式激光雷达
在那之后,Velodyne 顺理成章升级为激光雷达市场的统治者。谷歌搜罗了大量当年挑战赛的参与者创建自动驾驶部门后,就用上了 Velodyne 的激光雷达,其他参与自动驾驶开发的公司也无一例外成了 Velodyne 产品的买主。
眼下,大多数自动驾驶汽车都会搭载三类传感器:摄像头、雷达和激光雷达。不过每个类型的传感器都有自己的“长矛”和“软肋”。
举例来说,摄像头能捕捉高清晰度的彩色照片,但它没有测距能力,在测量远距离物体的速度上也差点意思。
雷达测距和测速能力都不错,最近几年其成本也在不断走低。“当物体离车辆较近时,雷达效果确实不错。”休斯顿大学雷达专家 Craig Glennie 解释。“不过由于它使用的是无线电波,因此在远距离情况下雷达细节不足。”
激光雷达则兼顾了上述两款传感器的优势。与雷达一样,激光雷达测距能力非常强悍,有些激光雷达也有测速能力。同时,其分辨率也比雷达要高,这就意味着它能侦测到更小的物体,并且分辨出这些物体是行人、摩托车或是垃圾堆。
与摄像头不同的是,激光雷达在任何光线条件下效果都不错。
当然,激光雷达也不是完美的,它最大的槽点就是昂贵的价格。当时用在赛车上的 Velodyne 64 线激光雷达价格高达 7.5 万美元。直到近一两年,它则开发出了体积更小、价格更便宜的 32 线和 16 线产品,不过最低价格也得 7999 美元。去年年末,Velodyne 还推出了全新 128 线激光雷达,虽然性能异常强悍,但 Hall 也对这款激光雷达的价格三缄其口。
去年,Velodyne 宣称拿到了福特的大单,它要开发一款新型固态激光雷达,一旦进入大规模量产,价格能拉低到 500 美元以下。不过,Velodyne 并未公布福特详细的采购量和采购价格,至于这款固态激光雷达何时进入量产,现在还是未知数。
现在的 Velodyne 可一步也不能停歇,因为激光雷达市场的竞争实在太激烈了。
固态激光雷达的崛起

对汽车制造商来说,零部件当然越耐用越好,因此带有各种活动部件的激光雷达肯定在可靠性和价格上无法做到尽善尽美,比如 Velodyne 的旋转式激光雷达。
鉴于这种原因,很多专家相信,激光雷达想进军主流市场就必须切换成固态设计,不过这就需要新的装置将激光发射到不同方向以覆盖车辆周边环境。
眼下,研究人员拿出了三种主要的固态激光雷达解决方案:
第一种是基于微机电系统(MEMS),整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。由于反射镜很小,因此其惯性力矩并不大,可以快速移动,速度快到可以在不到一秒时间里跟踪到 2D 扫描模式。
现在研发 MEMS 激光雷达的主要有 Luminar 和 Innoviz 两家公司。此外,名为 Infineon 的激光雷达公司最近收购了 Innoluce,后者就是一家 MEMS 激光雷达新创公司。去年 10 月,国产激光雷达厂商速腾聚创公布了固态激光雷达 MEMS(微机电系统)和 OPA (相控阵)固态激光雷达最新研发进展。
MEMS 激光雷达的一大优势是传感器可以动态调整自己的扫描模式,以此来聚焦特殊物体,采集更远更小物体的细节信息并对其进行识别,这是传统机械激光雷达无法实现的。
第二种激光雷达采用相控阵设计,它搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。如果发射器同步发射激光,激光则会射向同一个方向。不过,如果左侧发射器相位处在右侧之后,激光则会发射向左边,向右发射同理。
相控阵 LiDAR 工作原理
虽然原理简单易懂,但大多数相控阵激光雷达现在依然待在实验室里。Efficient Power Converter 公司 CEO Alex Lidow 表示:“我不得不说,相控阵激光雷达属于未来,现在我们还停留在旋转式或 MEMS 激光雷达的时代,前者更是处于统治地位。”
说到相控阵激光雷达,就不得不提 Quanergy,这家新创公司是 Strobe 公司的关键技术顾问,而去年 10 月份,Strobe 被通用收归门下,因此通用可能也在攻关这项技术。
第三种是 Flash LiDAR,它运行起来更像摄像头。激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。
Flash LiDAR 的一大优势是它能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦。不过,这种方式也有自己的缺陷。
“像素越大,你要处理的信号就越多。将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。”卡耐基梅隆大学机器人专家 Sanjiv Singh 解释。
当然,如果你对固态激光雷达有更多兴趣,2018 年 1 月 16 日,雷锋网新智驾将在硅谷举办 GAIR 硅谷智能驾驶峰会,我们邀请了重磅嘉宾如全球顶级的激光雷达公司 Velodyne CTO Anand Gopalan 进行主题演讲。他是 Velodyne 固态化与 ASIC 研发背后的“关键先生”。
探测距离是车载激光雷达的一大局限

简而言之,Flash LiDAR 没有“远视眼”,在实际使用中不适合远程探测,而业内专家坚信,全自动驾驶汽车上搭载的激光雷达至少一眼就得看到 200 到 300 米外的物体。
现任福特公司高管的 Jim McBride 2005 年时也组织了一支队伍参加 DARPA 的自动驾驶大赛,在接受采访时他解释了专家们做出这一判断的原因。
McBride 先假设了一个场景,即自动驾驶汽车想在进入高速时汇入车流。“当时的车流至少有 100 km/h,也就是说车每秒就能跑 30 米。这样的情况下,大多数车至少要花 6-10 秒钟才能提升至 100 km/h,因此它们必须能在这一时间里看到自己周边车辆的情况,即离自己 180-300 米的车辆。”
对任何激光雷达系统来说,向 300 米外发射激光并探测其反射信号并不容易。各大制造商也使出吃奶的劲找了一些增加激光雷达探测距离的方法。
如今,大多数激光雷达传感器的激光都处在近红外范围内,一般厂家都会选择 905 纳米这一波长。不过,它比较接近可见光的波长(红光波长约为 780 纳米),而激光会损害人眼,烧坏视网膜上的光敏探测细胞,因此 905 纳米激光的功率受到严格限制。
为了避免伤害人眼,研发人员决定换用另一种波长的激光。举例来说,Luminar 公司就开发了使用 1550 纳米激光的激光雷达。由于它大大超越了可见光的范围,因此对人眼来说要安全得多。
解决了安全问题,1550 纳米激光雷达的功率就能大幅提升。相关数据显示,研究人员将激光雷达功率提升了 40 倍,它探测远程激光信号的难度低多了。不过有得必有失,1550 纳米激光和探测器很贵,因为它们制造时需要更多特殊材料。
除了提升激光功率,我们还能通过增强探测器敏感度来扩展激光雷达探测距离。被福特高价收归门下的 Argo AI 去年收购了 Princeton Lightwave——一家用高敏感度探测器(单光子雪崩二极管)制作激光雷达 的公司。这种探测器相当敏感,适合频率中一个光子就能将其激活。
同时,这些高度敏感的探测器也不新鲜,在军事和勘探领域已经使用多年了。去年,Princeton 就表示要将该技术引入汽车市场。
飞行时间(TOF)vs 连续波调频

在开发新一代激光雷达时,厂商们还面临第三种设计上的新选择,即如何测算时间和距离。大多数激光雷达直截了当用了飞行时间的方法。它会发射一条非常短的脉冲,然后用超级精确的计时器来算出脉冲一去一回到底花了多少时间。
除了靠飞行时间来测算距离,一些厂商还开发了更为复杂的方法,并将其命名为连续波调频(CWFM)。从命名就可看出,这种方法会向目标发射连续的激光束,该光束会分成两道光束,一道会飞向目标并反射回来,在飞行途中则会与另一道光束重组。
从激光雷达发射出的激光束频率会稳定增长,而从它分出来的两道光束则飞行了不同的距离,重新结合后频率会有所差别。这就生成了一个有差频的干涉图样,研发人员能从中得出第一道光束的飞行距离。
这种方式有多个优点。首先,“连续波调频激光雷达根本不怕背景光的影响。”美国军火巨头洛马公司的 Paul Suni 解释。“传统的飞行时间激光雷达一旦遇到同频率的其它光源,可能就会不知所措。”同时,CWFM 系统更为灵敏,即使面对强烈的眩光,也能正常工作。
这一点相当重要,因为未来自动驾驶汽车普遍会搭载多颗激光雷达传感器,有大量激光在空中飞来飞去,传统的飞行时间激光雷达肯定会受到干扰。
CWFM 还有个大优点,即可以将探测物体的距离和速度一网打尽。对此,Suni 解释称:“如果你的传感器和路上的车辆间发生了相对运动,那么信号就会发生多普勒频移。如果你只测量一个频率,就会出问题。”与其相比,CWFM 激光雷达会对不断增长和不断降低的两个频率进行测定。通过计算,距离和速度问题就能迎刃而解。
眼下,在进行 CWFM 激光雷达技术攻关的是一家名为 Aeda 的新创公司,《纽约时报》还专门进行了报道。此外,上述提到的 Strobe 可能也在进行类似研发。
低价激光雷达在路上了?
*磷化铟晶圆
激光雷达到底如何设计,恐怕各家公司已经尝试了各种可能的方案,但就连专家也不敢断言到底哪种设计能笑到最后。不过,所有人都信心满满地表示,未来几年激光雷达将迎来大降价。
历史无数次的告诉我们,原本高不可攀的产品,最终都会飞入寻常百姓家,前提是进行大规模量产。
Lidow 认为激光雷达会重复当年 ABS 的普及路线。“1979 年时,我就在通用开发 ABS。”Lidow 说。“当时,这套系统装下来要 8000 美元,对消费市场来说实在太贵。不过,航空公司买得起。随着 ABS 系统价格不断下滑,连大卡车也享受到了这项新技术。别忘了,卡车可是有 18 个轮子。
几十年后的今天,一套 ABS 硬件价格才 20 美元。
“我亲眼见证了这场技术进化。”Lidow 补充道。“汽车公司恨不得省下一切不必要的成本,而激光雷达系统并不比当年的 ABS 系统复杂。”
Lidow 大胆预测称,未来激光雷达传感器价格可能会降到 10 美元级别。
卡耐基梅隆的 Singh 也认为激光雷达大降价就在眼前。“计算器刚刚诞生时也卖 1000 美元一台。随着产量的提升,价格开始逐渐下滑,人们将各种零部件融合在了一块芯片上。”
激光雷达行业里,这样的故事也在发生,研究人员试图将所有的传感器零部件塞进一块芯片。
“我们的激光雷达芯片来自 300 毫米晶元,如果能达到年产百万级别,其生产成本就能降到 10 美元。”麻省理工研究人员 Chris Poulton 和 Michael Watts 在一篇论文中写道。这种芯片用了光学相控阵技术,不需要机械零部件。
当然,现在年产百万的目标很难实现,有分析师甚至警告称,恐怕这样的产品还得在实验室多待几年才能真正进入消费市场。“所有公司都在试图生产能替代 Velodyne 激光雷达的低售价固态产品,但恐怕没那么容易。”
除了量产上的挑战,固态激光雷达还有一个巨大的劣势,那就是它相当有限的视场。
福特的 McBride 表示,相控阵系统“最多只能看到 50 度的场景”,现在还没人能突破这一瓶颈,而 MEMS 的视场也只有 30 到 60 度。
这就意味着,想替代现在的顶置旋转激光雷达,至少要在车上安装 6 到 12 个固态激光雷达,固态产品的价格优势便会荡然无存。因此,现在就断言机械激光雷达将死还为时尚早。“一个旋转的圆盘可不贵,而且别忘了,车里会旋转的机械零部件也不少,它们使用数万公里也没什么问题。”Lidow 说。
不过,历史的车轮滚滚向前,虽然想拉低激光雷达售价需要工程师的不断努力,但这条路上并没有什么难以克服的困难,因此高品质激光雷达售价跌到 1000 甚至 100 美元都是有可能的。
这就意味着,自动驾驶汽车的售价最终能为普通消费者所接受。而在此之前,一台激光雷达 7.5 万美元的售价就足够让人望而却步了。
眼下,大量资本正在注入激光雷达行业,为的就是开发出性能更强,价格更低廉的激光雷达产品。虽然现在我们无法预测激光雷达廉价化的那一天到底何时到来,但可以想见的是,原本是“天之骄子”售价高高在上的激光雷达会随着时间的流逝变得越来越便宜,性能也会越来越好。
最后,如果你对激光雷达有更多兴趣,2018 年 1 月 16 日,雷锋网新智驾将在硅谷举办 GAIR 硅谷智能驾驶峰会,我们邀请了重磅嘉宾如全球顶级的激光雷达公司 Velodyne CTO Anand Gopalan 进行主题演讲。他是 Velodyne 固态化与 ASIC 研发背后的“关键先生”。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

