





近期,自动驾驶无疑已经成为科技圈和汽车圈的热点话题,谷歌、百度、苹果及Uber等科技公司,特斯拉、奥迪、奔驰、宝马等主流汽车厂商纷纷投入自动驾驶领域。然而,关于自动驾驶技术路线之争也一直没有停止过。据了解,在不同技术路线中,所使用到的传感器主要有激光雷达、毫米波雷达以及摄像头三类,且各具优缺点。

激光雷达主导的解决方案未来可以沿如下两个方向继续推进商业化进程:
一、主流传感器对比
激光雷达:
激光雷达具有高精度、高分辨率的优势,同时具有建立周边3D模型的前景,然而其劣势在于对静止物体如隔离带的探测较弱且目前技术落地成本高昂。由于激光雷达可广泛应用于ADAS系统,例如自适应巡航控制(ACC)、前车碰撞警示(FCW)及自动紧急制动(AEB),因此吸引了不少具有先进技术的初创公司竞争,同时传统供应商也积极布局投资希望能够达成战略合作关系以便快速获得先进技术。
毫米波雷达:
与激光雷达相比,毫米波雷达具有探测距离远,不受天气状况影响以及成本低的优势。由于毫米波雷达采用硅基芯片,不会特别昂贵,也不涉及复杂工艺,同时正处于第二次工艺转型的重要时期,预计成本仍有下降空间。
相比激光雷达暂时高不可攀的成本以及较低的技术壁垒和自身可全天候工作的优势,毫米波雷达可以说是目前初创公司进入自动驾驶市场的一个门槛较低的入口。
摄像头:
车载摄像头是最基本常见的传感器,价格低廉且应用广泛同时具备雷达无法完成的图像识别功能,不仅可以识别路牌,在自动驾驶系统的图像处理方案中也是不可或缺的一部分。
鉴于目前激光雷达的高成本,摄像头配合高精度地图是另一种较低成本的技术路线。除了与高精度地图配合为自动驾驶提供定位服务,摄像头还可以在地图采集过程中作为低成本且数据传输量小(摄像头捕捉的是小尺寸的2D画面)的数据收集器。
二、视觉主导还是激光雷达主导?
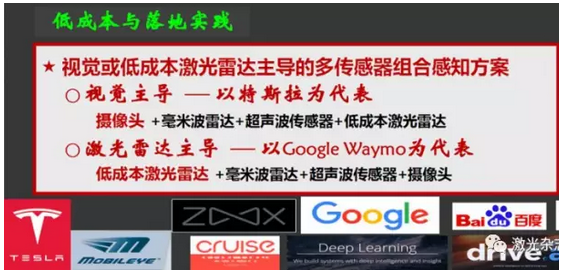
据清华大学邓志东教授介绍,自动驾驶环境感知的技术路线主要有两种:一种是以特斯拉为代表的视觉主导的多传感器融合方案,另一种以低成本激光雷达为主导,典型代表如谷歌Waymo。
1、视觉主导,以特斯拉为代表:摄像头+毫米波雷达+超声波雷达+低成本激光雷达。
摄像头视觉属于被动视觉,受环境光照的影响较大,目标检测与SLAM较不可靠,但成本低。目前,特斯拉已经在其量产车上列装了Autopilot 2.0固件,而且成本较低,只有7000美金左右,8个摄像头组成单目环视,有1个毫米波雷达和12个超声波雷达,希望从L2跳跃到L4。
经过半年的努力,特斯拉近期已经完成了将路测大数据从Mobileye单目视觉技术过渡到基于Nvidia Drive PX2计算硬件平台的特斯拉Vision软件系统上,并且在今年3月底发布了8.1软件版本,它用深度学习的方法在短期内基本达到了Mobileye的技术水平,这是以前很难想象的。特斯拉的自动驾驶技术究竟怎么样,一个重要的观察点就是看它能否在2017年年底,如期从洛杉矶开到纽约,实现全程4500公里且无人工干预的完全自主驾驶。
2、激光雷达主导,以Google Waymo为代表:低成本激光雷达+毫米波雷达+超声波传感器+摄像头。
激光雷达是主动视觉,它的目标检测与SLAM比较可靠,但是却丢失了颜色和纹理且成本高昂。目前谷歌Waymo自己组建团队研发激光雷达的硬件,把成本削减了90%以上,基本上是7000美金左右,同时他们已经开始在美国凤凰城地区对500辆L2级别的车进行社会公测,大大地推进了该类技术路线的落地实践。
激光雷达主导的解决方案未来可以沿如下两个方向继续推进商业化进程:
一个是发展摄像头与激光雷达的硬件模组,把两者结合起来,既有激光雷达,又有彩色摄像头,可以直接获得彩色激光点云数据。
另一个是进一步降低激光雷达的硬件成本,比如研发固态激光雷达并真正实现产业化,届时成本会下降到几百美金。
总之,现在自动驾驶领域有三大核心问题需要着力突破:即利用人工智能,尤其是利用深度学习进行目标识别、自主导航和信息融合,这三方面的技术成果是真正具有商业价值的。
目标识别:例如对交通流稠密的复杂城区,如何可靠地进行周边障碍物的检测与行为预测,特别是对极端与紧急情况的感知与预测。
自主导航:激光SLAM或视觉SLAM及其与低成本组合导航的精准融合;
信息融合:多传感器如何进行信息融合。
三、未来的趋势是什么?
目前,由于各种原因,不同厂商对于自动驾驶技术路线仍有争议,所采用的传感器组合方式也有侧重。但是,对于未来发展趋势,业内主流观点认为毫米波雷达、激光雷达以及摄像头等多种传感器的融合才是实现自动驾驶的必由之路。显然,以色列创业公司Innoviz CEO兼联合创始人Omer David Keilaf也是这种观点的支持者。
他认为,将毫米波雷达、摄像头、激光雷达等传感器数据融合的技术,对于保证车辆对周边环境的全局定位和理解是至关重要的,且为Level 3-Level 5级自动驾驶方案的实现提供了必要的技术储备。在环境感知中,每一种传感器都有独特的优势和弱点。例如,毫米波雷达可在低分辨率情况下完成测距,且受天气因素影响小;而摄像头有更高的分辨率,能够感知颜色,但受强光影响较大;激光雷达则能够提供三维尺度感知信息,对环境的重构能力更强。
在这种前提下,只有几种传感器的融合才能提供车辆周围环境更精准的绘图信息,并达到OEM主机厂所需的安全标准。目前,高性能激光雷达的量产和成本问题,仍是通往多传感器融合技术方案,乃至完全自动驾驶的障碍之一。
转载请注明出处。

 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读

































 关注我们
关注我们

